3703947802
2. (02) Zasada działania hiperbolicznych systemów nawigacyjnych.
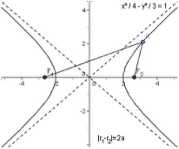
Dwuwymiarowa hiperbola to krzywa będąca zbiorem punktów, których różnica odległości od dwóch jej ognisk jest taka sama. Na obrazku wygląda to jakoś tak (ogniska to FI i F2):
Powstaje pytanie: na cholerę nam to w nawigacji ?
Otóż koncepcja jest taka:
- w ogniskach hiperboli stawiamy radiolatamie (takie coś jak latarnia morska, ale świeci nie światłem widzialnym, a falą elektromagnetyczną o jakiejś innej częstotliwości)
- radiolatamie pracują w pełni synchronicznie, emitując taki sam sygnał
- jak łatwo zauważyć, w ogólności sygnał taki dotrze do nas z jednej latami wcześniej, a z drugiej później. A ponieważ latarnie pracują synchronicznie, będziemy w stanie określić tę różnicę czasu. Powiedzmy że wynosi ona jakieś At.
- Na rysunku powyżej (małym drukiem na dole) zanotowano dla jakiej różnicy odległości wykreślona jest ta hiperbola (|tl -12| = 2a). Jeśli tak się przypadkiem złoży że nasze At = 2a, to okaże się że znajdujemy się gdzieś na narysowanej krzywej. Jeśli nasze At jest inne, to znajdziemy się na innej krzywej o podobnym kształcie (“szerszej” albo “węższej”).
- Ponieważ wiedza o tym że jesteśmy na jakiejś krzywej jest w ogólności dość bezużyteczna, do systemu dodajemy trzecią radiolatamię, również zsynchronizowaną z pozostałymi. W ten sposób otrzymujemy trzy par\' radiolatarń i trzy krzywe (do określenia naszej pozycji wystarczą oczywiście 2 takie pary) na których się znajdujemy. Punkt przecięcia tych krzywych to nasza rzeczywista pozycja. Amen.
Systemy wykorzystujące nawigację hiperboliczną to na przykład: LORAN, DECCA, OMEGA
3. (03) Hiperboliczny system nawigacji LORAN.
LORAN (LOngRAnge Navigatioń). Obecnie w użytku został ty lko Loran - C, uratow any przez żeglugę morską. Radiolatamie LORAN są zorganizowane w łańcuchy: stacja główna (master) i stacje podlegle (slave). Stacja główna inicjow ała nadawanie grup impulsów pomiarowych, wyzwalając tym samym nadawanie stacji podległej. Każdy łańcuch LORAN C ma jedną stację główną (V) i cztery (choć może być więcej) stacji podległych, oznaczanych W, X, Y, Z. Nadajniki mogą być różnej mocy (od 200 kW do 2 MW) i pełnić różne funkcje: stacja może być stacją główną w jednym łańcuchu i jednocześnie podległą w innym. W łańcuchu NEUS 9960 (NEUS -Norlh - East United States) każda z pięciu stacji jest takim "podwójnym agentem".
Stacja główna nadaje paczki po 9 impulsów. Pierwsze osiem co 1000 mikrosekund, dziewiąty 2000 mikrosekund później - taka sekwencja odróżnia sygnał stacji głównej. Kiedy pierwsza stacja podległa odbierze sygnał stacji głównej, nadaje swój, i tak do końca łańcuszka. Potem stacja główna zaczyna kolejną sekwencję.
Stacje emitują dw a typy sygnałów, różniące się wartościami częstotliwości pow tarzania (GRI - Group Repetition Intemał). Sygnał ty pu C ma 33.3 Hz, 25 Hz i 20 Hz (jak LORAN A), natomiast sygnał Cs 16.66 Hz, 12.5 Hz i 10 Hz. LORAN C pracuje na jednym kanale 100 kHz. Dokładność wyznaczania położenia wynosi 0.25 NM (około 450 m).
Wyszukiwarka
Podobne podstrony:
Systemy diagnostyki pokładowej pojazdów 2.2. Zasada działania Diagnostyczny system kontroli emisji
4. (04) Zasada i schemat doplerowskiego systemu nawigacji. System dopplerowski, jak sama nazwa wskaz
5. (05) Zasada i schemat inercyjnego systemu nawigacji. System inercyjny, podobnie jak omówiony powy
Efekty kształcenia: Podstawowa wiedza o zasadach działania i zastosowaniach systemów radionawigacji
a006 — 6 — mUIMITRRDIORA ZASADA DZIAŁANIA KWADROFONICZNEGO SYSTEMU SQ T»06,ł08 H10 TCOl.603,605,
a007 — 7 — — 7 — UNITRRjTiTi DIORA L=i ZASADA DZIAŁANIA KWADROFONICZNEGO SYSTEMU SQ kodującej, na
736 Plan działania 1. Zaktualizować systemy transakcyjne i wykresy. Może to być
P1100128 Zarys treści wykładu ■ budowa i zasada działania systemu nawigacji
Wprowadzenie Systemy operacyjne Systemy operacyjne Zasada działania systemu
IMAG0199 Pompa zębata -zasada działania, systematyka, Konstrukcja *?ł 2 f fifrm«a alowt^d f porep zę
więcej podobnych podstron