3703947804
4. (04) Zasada i schemat doplerowskiego systemu nawigacji.
System dopplerowski, jak sama nazwa wskazuje opiera sie na efekcie Dopplera. Efekt ten polega na tym, że jeśli źródło bądź odbiornik sygnału jest w ruchu, to odebrana częstotliwość sygnału różni się od nadanej zależnie od względnej różnicy prędkości nadajnika i odbiornika. W naszym przypadku zarówno nadajnikiem jak i odbiornikiem jest nasz statek czy ogólnie nasze urządzenie nawigacyjne. System taki zakłada że będąc w ruchu wyślemy sygnał, on się od czegoś odbije i do nas (nadal będących w ruchu) wróci. W ten sposób będziemy mogli na bieżąco znać (z dużą dokładnością) swoją prędkość.
A jak czymś takim nawigować ?
Otóż system taki (podobnie jak omówiony poniżej system inercyjny) jest systemem zliczeniowym. Działa to w skrócie tak:
- znamy swoją pozycję początkową (zanim w ogóle zaczniemy się ruszać - np. statek w porcie albo po prostu odczyt z GPS-u)
- zaczynamy się przemieszczać, cały czas zapisując prędkość (kierunek i wartość)
- jak wszyscy wiemy z podstawówki, droga to całka z prędkości po czasie, a zatem, znając przebieg prędkości, możemy wyznaczyć drogę jaką przebyliśmy i nanieść to na mapę
- i już mamy' nawigację
Zaletą takiego systemu jest pewna (choć nie tak duża jak w inercyjnym) autonomia - nie potrzebujemy żadnych satelitów', radiolatami ani innego takiego shitu żeby określić naszą pozycję.
Wadą natomiast jest to, że im dłużej taki system działa bez porów nania z jakąś referencją typu GPS, tym bardziej gromadzą się błędy i staje się on mniej dokładny. Do tego wiązka naszego sonaru czy radaru ma pewną szerokość, co stwarza dodatkow e problemy (trzeba estymow ać jej “środek”, a w związku z tym także poszukiwana częstotliwość dopplerow ska podlega estymacji)
Zalety i wady dokładniej:
+ Autonomiczność działania
+ Bezpośredni, ciągły pomiar wszystkich składników wektorowych prędkości względem Ziemi + Małe moce zasilania, wielkości kosztów + Duża dokładność
- Korzy stanie z zew nętrznych wskaźników' kierunku
- Zmniejszenie dokładności ze wzrostem odległości
- Dokładność pomiaru zależy od rodzaju podłoża
W ogólności, aby skompensować różnego rodzaju przechyły, drgania i nierówności dna mogące pogorszy ć pomiar, stosuje się niejedną a kilka wiązek, np. 4. których szerokość wynosi między 4 a 8 stopni.
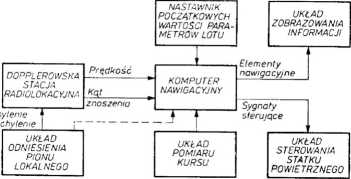
Schemat tego ustrojstwa (w tym przy padku dla samolotu):
Schemai blokowy nawigatora dopplerowskiego
Wyszukiwarka
Podobne podstrony:
138 Monika Jeziorska W systemach eksperckich, jak sama nazwa wskazuje, decyzja o udzieleniu kredytu
440 Blender. KompendiumColor Nodes Jak sama nazwa wskazuje, dodane do schematu z tego poziomu Nodes
221 Blender kompedium 440 Blender. KompendiomColor Nodes Jak sama nazwa wskazuje, dodane do schematu
5. (05) Zasada i schemat inercyjnego systemu nawigacji. System inercyjny, podobnie jak omówiony powy
Rozdział H. ♦ System Nodes 433 Zacznijmy od omówienia pierwszej z nich (rysunek 11.14). Jak sama naz
2. (02) Zasada działania hiperbolicznych systemów nawigacyjnych. Dwuwymiarowa hiperbola to krzywa bę
Image 01 (7) Imię i nazwisko, grupa ..!JSPOM-K WW 27.04.2001 1. Narysować schemat funkcjonalny syste
najprostsza możliwa domowa instalacja telefoniczna wybieranie poprzez pokręcenie tarczą Rys. 1. Sc
więcej podobnych podstron