Mechanika ogolna0032
M
.5.2.2. Reakcje dynamiczne w łożyskach
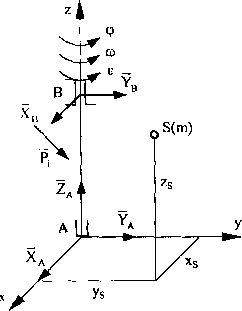
Wyobraźmy sobie ciało sztywne osadzone na wale, który z kolei jest podparty w łożyskach A i B (rys. 33). Załóżmy, że środek masy nie leży w osi obrotu. Przyjmijmy układ odniesienia jak na rysunku. Położenie środka masy w układzie określimy, podając współrzędne: xs, ys, zs.
Równania dynamiczne opisujące ruch środka masy będą następujące: m-1s=ZPix
i=l
n
(124)
m-ys=XPiy ■
i=l
n
i=l
Zgodnie ze wzorem (118) składowe przyspieszenia środka masy możemy zapisać:
Wprowadzimy wzory (125) do układu równań (124) oraz wykorzystamy równanie (121). Dostaniemy:
n
|
i=i |
= -m-e-ys -m-co2 -x |
|
Ul |
= m-e-xs - m-co2 -ys |
|
IX Ul |
= 0 |
|
ŻMX Ul |
(S)=-i« -s+u-®2 |
|
ŻMy |
(Pi) = -Iy* -e-U |
Ul
(126)
Układ (126) umożliwia określenie reakcji w łożyskach. Trzy pierwsze wzory wynikająz równań (124), a dwa następne z równań (121).
I Iw.iga!
Z równań (126) określamy reakcje w łożyskach. Zależą one od e i co
| co = • Mówimy, że reakcje mają charakter dynamiczny, co ze wzglę
du na żywotność łożysk jest niekorzystne. Dlatego dążymy do takiego rozwiązania, aby bez względu na e i co reakcje miały charakter statyczny. Jeżeli środek masy leży na osi obrotu z, to:
xs = Ol
k mówimy wówczas, że bryła jest wyważona statycznie.
y.s=oj
Jeżeli oś obrotu jest główną osią bezwładności, to: (idy spełnione są oba warunki, mówimy, że bryła jest wyważona dynamicznie, czyli wówczas oś zjest główną centralną osią bezwładności.
s =-e ys-“Z 1s ys=e-xs-0)2-ys >
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0032 (>4 :?.2.2. Reakcje dynamiczne w łożyskach Wyobraźmy sobie ciało sztywne osa
skanuj0004 Obliczenie reakcji dynamicznych łożysk Ui=100 gem =0,001 kgm U2 = 210 gem = 0,0021 kgm&nb
skanuj0006 4. Obliczenie reakcji dynamicznych łożysk Ui=100 gem =0,001 kgm U2 = 210 gem = 0,0021 kgm
Mechanika ogolna0036 723.4. Dynamika układu brył ()pisując zjawisko ruchu układu brył, postępujemy w
207 (3) Usuwanie reakcji alergicznych Krok 1. Wyobrażenie sobie byda wystawionym na działanie
104T38 działać na planie i wyobrazić sobie wpływ ich interakcji na całość filmu lub projektu (oczywi
82 (155) kasta: Wyobrażam sobie twojego tatę jako wiecznego chłopca, który bardzo lubił i kochał swo
Mechanika ogolna0039 78 _ nK0=S^xmi Vi’ i=l po zrzutowaniu tego równania na układ odniesienia dostan
więcej podobnych podstron