Mechanika ogolna0036
72
3.4. Dynamika układu brył
()pisując zjawisko ruchu układu brył, postępujemy wg następującej kolejności:
a) na rysunku znaczymy wszystkie siły zewnętrzne działające na poszczególne bryły,
b) w zależności od tego, jakim ruchem porusza się bryła, opisujemy ruch, podając różniczkowe równania ruchu,
c) podajemy równania wynikające z zależności siłowych,
d) określamy zależności kinematyczne układu.
Tak otrzymany układ równań rozwiązujemy.
1’rzykład 11
()pisać zjawisko ruchu mechanizmu płaskiego pokazanego na rys. 37.
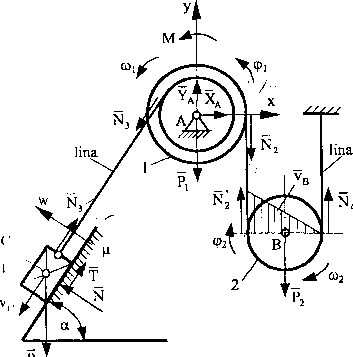
p - współczynnik tarcia, a - kąt pochylenia równi.
Nys. 37
Dane:
R, - promień dużego koła bryły 1 [m], r, - promień małego koła bryły 1 [m], r2 - promień bryły 2 [m],
i® = i - promień bezwładności bryły
1 [m],
M = const. - moment siły działający na bryłę 1 [N-m],
Uównania opisujące ruch bryły 1:
(l)I^-(p1=M + N3-r1-N2-R1,
(2) m, -xA =0 = XA -N3 -cosa,
(3) m, • yA 0-Ya -N3 -cosa-Nj -P,.
Pierwsze równanie opisuje ruch obrotowy bryły, dwa kolejne opisują ruch jej środka masy na kierunkach osi układu odniesienia. Środek masy się nie przemieszcza i z równań tych po znalezieniu sił napięcia lin (N3, N2) wyznaczymy trakcje w łożysku A.
Kównania opisujące ruch bryły 2:
(4) m2 -xB =0,
(5) m2-yB=N'2+N4-P2, (ó)42)-ćp2=(N'-N4)r2.
I li yla 2 jest w ruchu płaskim. Równanie (5) opisuje ruch środka masy, równanie ((•) opisuje ruch obrotowy bryły względem środka masy.
Kównania opisujące ruch bryły 3:
(7) m3 • iic = P3 ■ sin a - N3 - T,
(8) m3 -wc = 0 = N-P3 cosa.
Iliyla 3 jest w ruchu postępowym. Przy opisywaniu ruchu postępowego bryły pn/,(islającej na równi korzystny jest taki dobór osi układu odniesienia (w tym przypadku u i w), aby jedna oś pokrywała się z kierunkiem równi, a druga była do niej prostopadła.
Po określeniu dynamicznych równań ruchu poszczególnych brył podajemy zależności siłowe układu. Zakładamy, że wszystkie liny w układzie są zawsze napięte. Będziemy więc mieli:
Następnie określamy zależności kinematyczne wynikające z rozkładu prędkości 1 hm nkturystycznych punktów układu, czyli:
fR, -co, = 2• vB -2- r2 -co2,

Wiadomo, że:

Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0032 M.5.2.2. Reakcje dynamiczne w łożyskach Wyobraźmy sobie ciało sztywne osadzone
Mechanika ogolna0058 1164.2.5. Moc układu /miana pracy siły w odniesieniu do jednostki czasu nazywa
Mechanika ogolna0072 144TEMAT 9 Płaskie układy brył, obciążone jak pokazano na rysunkach, pozostają
Mechanika ogolna0032 (>4 :?.2.2. Reakcje dynamiczne w łożyskach Wyobraźmy sobie ciało sztywne osa
Mechanika ogolna0017 2. DYNAMIKA UKŁADUPUNKTÓW MATERIALNYCH2.1. Uwagi wstępne Zbiór punktów material
Mechanika ogolna0020 40 Są to różniczkowe równania ruchu środka masy układu, czyli dynamiczne równan
Mechanika ogolna0056 112Przykład 15 Opisać zjawisko ruchu układu pokazanego na rys. 65, stosując zas
więcej podobnych podstron