skanowanie0007
186
naciśnięcie przycisku STOP AWARYJNY umiejscowionego na panelu programowania,
- zadziałanie jednego z zabezpieczeń nadmiarowo-prądowych włączonych w obwód zasilania każdego z silników napędowych części mechanicznej,
- zadziałanie wyłączników krańcowych w części mechanicznej,
- zadziałanie wyłączników i przycisków umiejscowionych w innych urządzeniach stanowiska zrobotyzowanego,
- brak sygnału aktywności zespołu sterującego „control ready".
Po zadziałaniu obwodu stopu awaryjnego należy sprawdzić i usunąć przyczynę, a następnie nacisnąć przycisk kasowania stopu awaryjnego.
15.6.2. Funkcje układu sterowania
Funkcje układu sterowania USR są w znacznej mierze określone przez program sterujący. Zbiór funkcji dostępny z panelu programowania pozwala na sporządzenie oprogramowania użytkowego dla większości zastosowań robotów. System programowania jest otwarty, co umożliwia łatwe dodawanie nowych bloków programu i tym samym rozszerzenie możliwości funkcjonalnych robota.
W wersji podstawowej układ sterowania ma możliwości:
- sterowania typu PTP i CP z nastawianą prędkością ruchów osi robota,
- realizacja ruchu roboczego narzędzia (TCP) we współrzędnych kartezjańskich lub cylindrycznych związanych z podstawą robota lub we współrzędnych wewnętrznych robota,
- programowania ruchu po linii prostej lub okręgu, które mogą być dowolnie zorientowane w przestrzeni,
- współpracy z czujnikami zewnętrznymi, co umożliwia budowę adaptacyjnych układów sterowania,
- zapisywania i przechowywania programów użytkownika w pamięci zewnętrznej. Układ sterowania umożliwia sterowanie 5 lub 6 osiami robota oraz sterowanie
do 4 zewnętrznych serwomechanizmów urządzeń współpracujących z robotem.
15.6.3. Funkcje panelu operacyjnego i panelu programowania
Do obsługi robota służą przełączniki, przyciski i lampki znajdujące się na panelu operacyjnym (rys. 15.5a) i na panelu programowania (rys. 15.5b, c).
Wyłącznik SIEC umożliwia włączenie napięcia zasilania do układu sterowania. Do włączenia i wyłączenia niezbędny jest klucz dostarczony wraz z robotem.
Po każdym włączeniu zasilania robot musi być synchronizowany.
Panel operacyjny
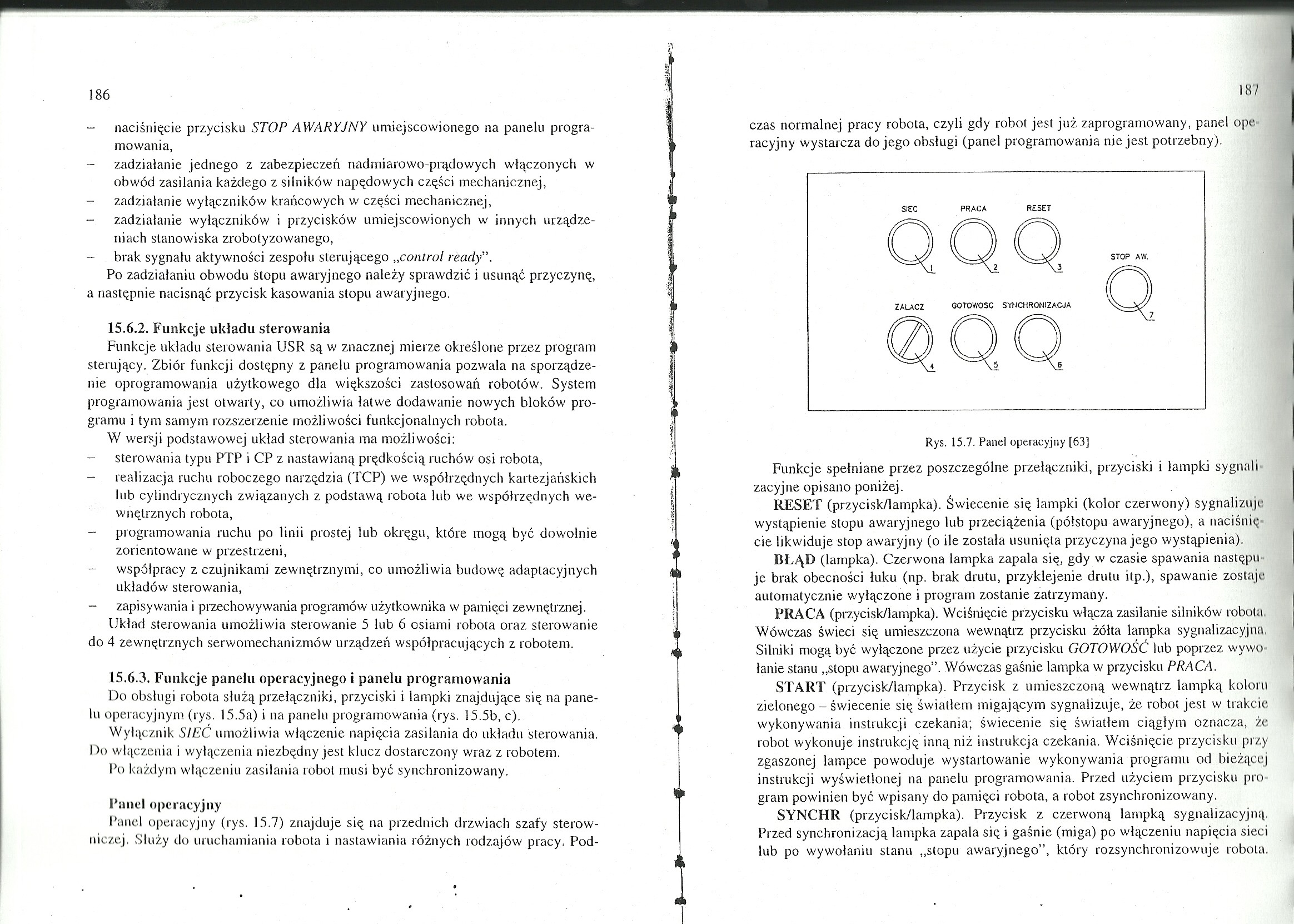
Panel operacyjny (rys. 15.7) znajduje się na przednich drzwiach szafy sterowniczej. Służy do uruchamiania robota i nastawiania różnych rodzajów pracy. Podczas normalnej pracy robota, czyli gdy robot jest już zaprogramowany, panel operacyjny wystarcza do jego obsługi (panel programowania nie jest potrzebny). *
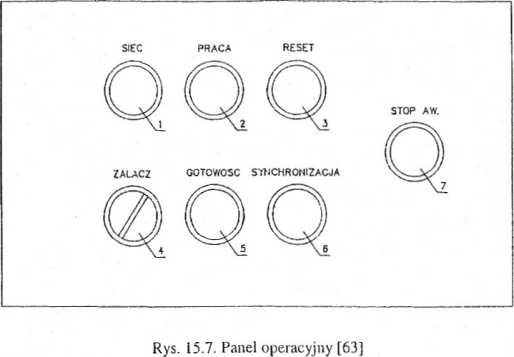
Funkcje spełniane przez poszczególne przełączniki, przyciski i lampki sygnalizacyjne opisano poniżej.
RESET (przycisk/lampka). Świecenie się lampki (kolor czerwony) sygnalizuje wystąpienie stopu awaryjnego lub przeciążenia (półstopu awaryjnego), a naciśnięcie likwiduje stop awaryjny (o ile została usunięta przyczyna jego wystąpienia). ‘:t
BŁĄD (lampka). Czerwona lampka zapala się, gdy w czasie spawania następuje brak obecności łuku (np. brak drutu, przyklejenie drutu itp.), spawanie zostaje automatycznie wyłączone i program zostanie zatrzymany.
PRACA (przycisk/lampka). Wciśnięcie przycisku włącza zasilanie silników robota. Wówczas świeci się umieszczona wewnątrz przycisku żółta lampka sygnalizacyjna. Silniki mogą być wyłączone przez użycie przycisku GOTOWOŚĆ lub poprzez wywołanie stanu „stopu awaryjnego”. Wówczas gaśnie lampka w przycisku PRACA.
START (przycisk/lampka). Przycisk z umieszczoną wewnątrz lampką koloru zielonego - świecenie się światłem migającym sygnalizuje, że robot jest w trakcie wykonywania instrukcji czekania; świecenie się światłem ciągłym oznacza, że robot wykonuje instrukcję inną niż instrukcja czekania. Wciśnięcie przycisku przy zgaszonej lampce powoduje wystartowanie wykonywania programu od bieżącej instrukcji wyświetlonej na panelu programowania. Przed użyciem przycisku program powinien być wpisany do pamięci robota, a robot zsynchronizowany.
SYNCHR (przycisk/lampka). Przycisk z czerwoną lampką sygnalizacyjną. Przed synchronizacją lampka zapala się i gaśnie (miga) po włączeniu napięcia sieci lub po wywołaniu stanu „stopu awaryjnego”, który rozsynchronizowuje robota.
Wyszukiwarka
Podobne podstrony:
MGW13 186 naciśnięcie przycisku STOP AWARYJNY umiejscowionego na panelu programowania, zadziałanie
6- Naciśnij przycisk Skanuj film (®H) na skanerze lub kliknij Skanuj film w programie Centrum obsług
3 31 (4) SCHOWKI Schowek 3 W celu otwarcia schowka, należy nacisnąć przycisk 4. W niektórych wersjac
3 Naciśnij przycisk skanera ZAPISZ DOKUMENT NA DYSKU i postępuj według monitów wyświetlanych na ekra
Naciśnij przycisk Skanuj film (®H) na skanerze lub kliknij Skanuj film w programie Centrum obsługi H
Skanowanie obrazów naciśnij przycisk Skanuj (^), aby zeskanować zdjęcia oraz grafikę. Aby uzyskać
www.conrad.plC3NRAD 2. Naciśnij przycisk „Preview" na oknie dialogowym. Jak skaner zeskanuje
Strona00200 - 201 186. Układ elektroniczny z diodą elektroluminiscencyjnę Po naciśnięciu przycisku z
ksiazka(166) Założyć końcówkę przewodu wyaokiego napięcia na świecę i nacisnąć przyciak przełącznika
20258 Scan10094 FM-AS, MW, LW). Naciśnięcie przycisku (1 - 6) w każdym paśmie na krócej niż 2 sek. w
Przycięty obraz ze skanowanego slajduTworzenie kopii Naciśnij przycisk Kopiuj (5p), aby zeskanować
Skanowanie do pliku PDF Naciśnij przycisk Skanuj do PDF (^df), aby zeskanować dokument lub zdjęcie i
str056 057 • Spryskiwaczewewnętrzne Naciśnij przycisk na końcu dźwigni. Spryskiwacze} wycieraczki
skanowanie0008 Synchronizację można wykonać, gdy świeci się lampka PRACA. Po naciśnięciu przycisku S
282 Blender kompedium 562 Blender. Kompendium na skutek ponownego naciśnięcia przycisku, przy czym w
ksnapshot —-wKSnapshot Naciśnij przycisk‘Zrzut’, a potem kliknij na okno aby zrobić zrzut tego okna.
więcej podobnych podstron