skanowanie0008
Synchronizację można wykonać, gdy świeci się lampka PRACA. Po naciśnięciu przycisku SYNCHRONIZACJA odbywa się ruch każdej osi robola, aż do osiągnięciu położenia zerowego, przy czym w czasie ruchu osi robota lampka SYNCHRONIZACJA świeci się w sposób ciągły. Gdy w ruchu wszystkich osi zostanie osiągnięte położenie zerowe, lampka gaśnie. Położenie zerowe w ruchu poszczególnych osi może być osiągnięte w różnej kolejności, a start procesu synchronizacji musi nastąpić z określonego położenia (pkt 15.7). Nie jest możliwe jednoczesne wykonanie synchronizacji i pracy ręcznej. Przyciśnięcie przycisku STOP w czasie synchronizacji zatrzymuje robota, a wciśnięcie przycisku SYNCHRONIZACJA wznawia proces synchronizacji.
GOTOWOŚĆ (przycisk/lampka). Po wciśnięciu przycisku robot zostaje przygotowany do pracy (wewnątrz przycisku świeci się żółta lampka sygnalizacyjna), tzn. podane jest zasilanie do wszystkich zespołów elektronicznych oprócz stopni wyjściowych w sterownikach mocy (nie są zasilane silniki). Przyciskiem tym można dokonać także powrotu ze stanu zatrzymania awaryjnego do stanu gotowości. Lampka przycisku GOTOWOŚĆ gaśnie, gdy wciśnięty zostanie przycisk PRACA i przejście do stanu „praca”.
STOP (przycisk). Przycisk (kolor czerwony) służy do zatrzymania wykonywania programu w pracy automatycznej, zatrzymania robota w czasie synchronizacji lub zatrzymania zapisu/odczytu pamięci zewnętrznej. Po wciśnięciu przycisku gaśnie lampka w przycisku START. Ponowne wciśnięcie przycisku START powoduje kontynuację programu. Aby wykonać program od początku, należy wcisnąć przycisk STPOCZ na panelu programowania.
STOP AWARYJNY (przycisk). Wciśnięcie przycisku powoduje natychmiastowe zatrzymanie ruchu manipulatora w wyniku odcięcia zasilania silników manipulatora. Zapala się lampka GOTOWOŚĆ i robot przechodzi w stan „gotowość”. Stan „stopu awaryjnego” jest sygnalizowany świeceniem się czerwonej lampki RESET. Skasowanie stanu „stopu awaryjnego” jest możliwe po usunięciu przyczyny, przez wciśnięcie przycisku/lampki RESET lub przycisku/lampki GOTOWOŚĆ.
Panel programowania
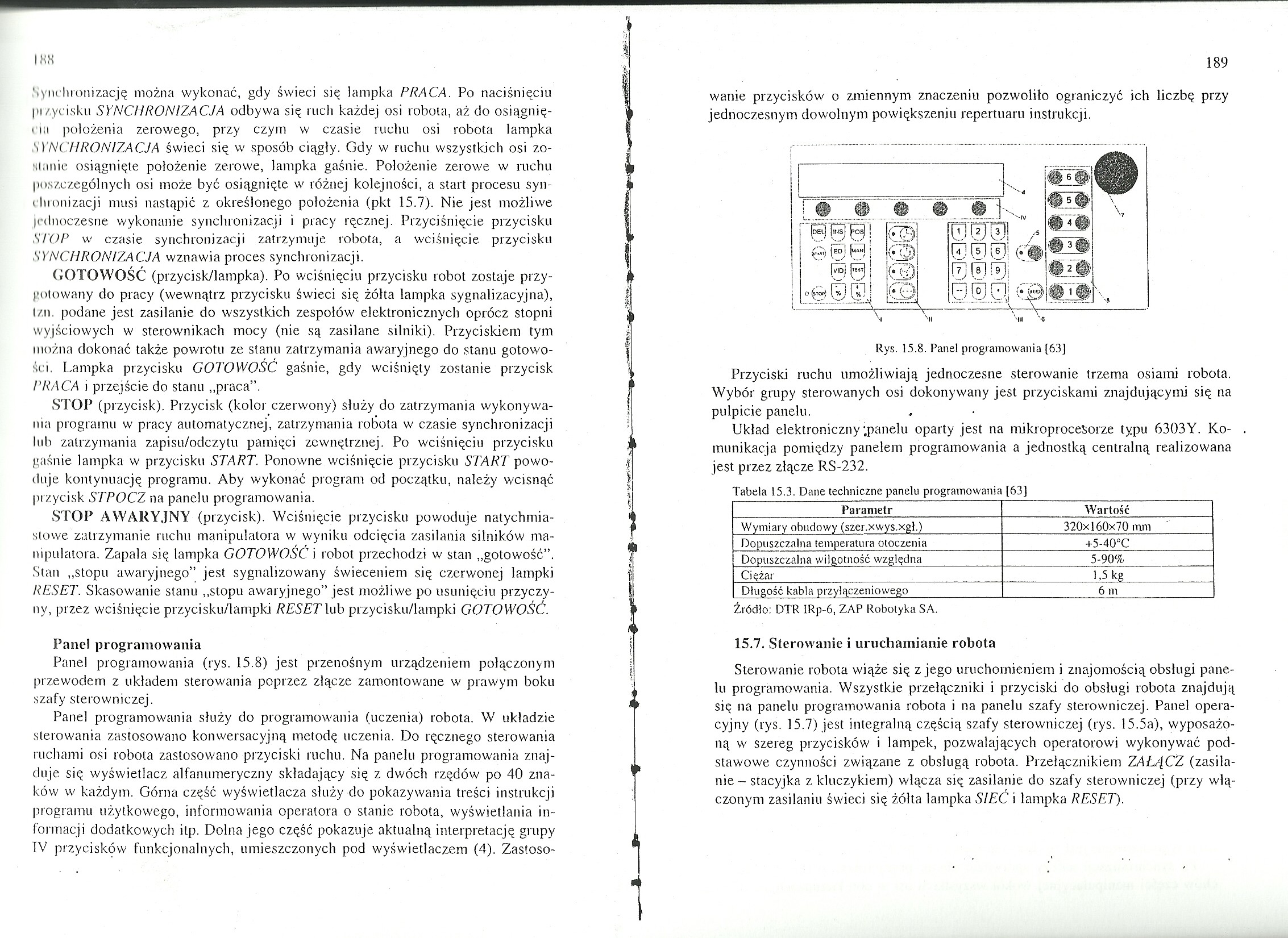
Panel programowania (rys. 15.8) jest przenośnym urządzeniem połączonym przewodem z układem sterowania poprzez złącze zamontowane w prawym boku szafy sterowniczej.
Panel programowania służy do programowania (uczenia) robota. W układzie sterowania zastosowano konwersacyjną metodę uczenia. Do ręcznego sterowania ruchami osi robota zastosowano przyciski ruchu. Na panelu programowania znajduje się wyświetlacz alfanumeryczny składający się z dwóch rzędów po 40 znaków w każdym. Górna część wyświetlacza służy do pokazywania treści instrukcji programu użytkowego, informowania operatora o stanie robota, wyświetlania informacji dodatkowych itp. Dolna jego część pokazuje aktualną interpretację grupy IV przycisków funkcjonalnych, umieszczonych pod wyświetlaczem (4). Zastosowanie przycisków o zmiennym znaczeniu pozwoliło ograniczyć ich liczbę przy jednoczesnym dowolnym powiększeniu repertuaru instrukcji.
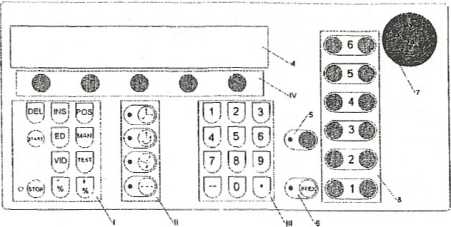
Rys. 15.8. Panel programowania [63]
Przyciski ruchu umożliwiają jednoczesne sterowanie trzema osiami robota. Wybór grupy sterowanych osi dokonywany jest przyciskami znajdującymi się na pulpicie panelu.
Układ elektroniczny ;panelu oparty jest na mikroprocesorze typu 6303Y. Ko- . munikacja pomiędzy panelem programowania a jednostką centralną realizowana jest przez złącze RS-232.
Tabela 15.3. Dane techniczne panelu programowania [63]
|
Parametr |
Wartość |
|
Wymiary obudowy (szer.xwys.xgl.) |
320x160x70 mm ' |
|
Dopuszczalna temperatura otoczenia |
+5-40°C |
|
Dopuszczalna wilgotność względna |
5-90% |
|
Ciężar |
_1.5 kg |
|
Długość kabla przyłączeniowego |
6 m |
Źródło: DTR lRp-6, ZAP Robotyka SA.
15.7. Sterowanie i uruchamianie robota
Sterowanie robota wiąże się z jego uruchomieniem i znajomością obsługi panelu programowania. Wszystkie przełączniki i przyciski do obsługi robota znajdują się na panelu programowania robota i na panelu szafy sterowniczej. Panel operacyjny (rys. 15.7) jest integralną częścią szafy sterowniczej (rys. 15.5a), wyposażoną w szereg przycisków i lampek, pozwalających operatorowi wykonywać podstawowe czynności związane z obsługą robota. Przełącznikiem ZAŁĄCZ (zasilanie - stacyjka z kluczykiem) włącza się zasilanie do szafy sterowniczej (przy włączonym zasilaniu świeci się żółta lampka SIEĆ i lampka RESET).
Wyszukiwarka
Podobne podstrony:
MGW14 Synchronizacji; można wykonać, gdy świeci się lampka PRACA. Po naciśnięciu przycisku SYNCHRON
125(2) Wycieraczka tylnej szyby 1 Przerywana praca wycieraczki Świeci się lampka k
139(2) □FF OFF Ekonomiczny tryb pracy Włączenie: nacisnąć przycisk
Resize of&3 W celu wyłączenia układu ESP nacisnąć górną cześć włącznika. Świeci się lampka ostrzegaw
263(1) W celu wyłączenia układu ESP nacisnąć górną część włącznika. Świeci się lampka ostrzegawcza n
statystyka skrypt�27 Br Po naciśnięciu przycisku tZmiennal wskazuje się zmienną, do której ma być do
statystyka skrypt�48 Jako rezultat obliczeń, otrzymuje się ekran wyników i po wybraniu przycisku [Po
Strona00200 - 201 186. Układ elektroniczny z diodą elektroluminiscencyjnę Po naciśnięciu przycisku z
statystyka skrypt�90 Zmienne niezależne i zależne okleiła się po naciśnięciu przycisku jZnaieunej. J
63 Słuchanie radia (2) Nastawianie programu Następny odbierany program nastawia się po naciśnięciu p
57601 statystyka skrypt�90 Zmienne niezależne i zależne okleiła się po naciśnięciu przycisku jZnaieu
WA308?7 II5947 NAUKA O LUDACH�321 I 305 właśnie wtedy, gdy to pisał, na nowo po Europie podróż swą o
silników Ml i M2. Po naciśnięciu przycisku START1 włączony zostaje stycznik 1K, po czym zwierają się
IMGA Najpierw oczyszcza się plac budowy z wszelkiej roślinności, co w czasie suszy można wykonać wyp
więcej podobnych podstron