skanowanie0065 (2)
Moment bezwładności układu zredukowany do osi O
kg-m2
71 ,
, = — mr"
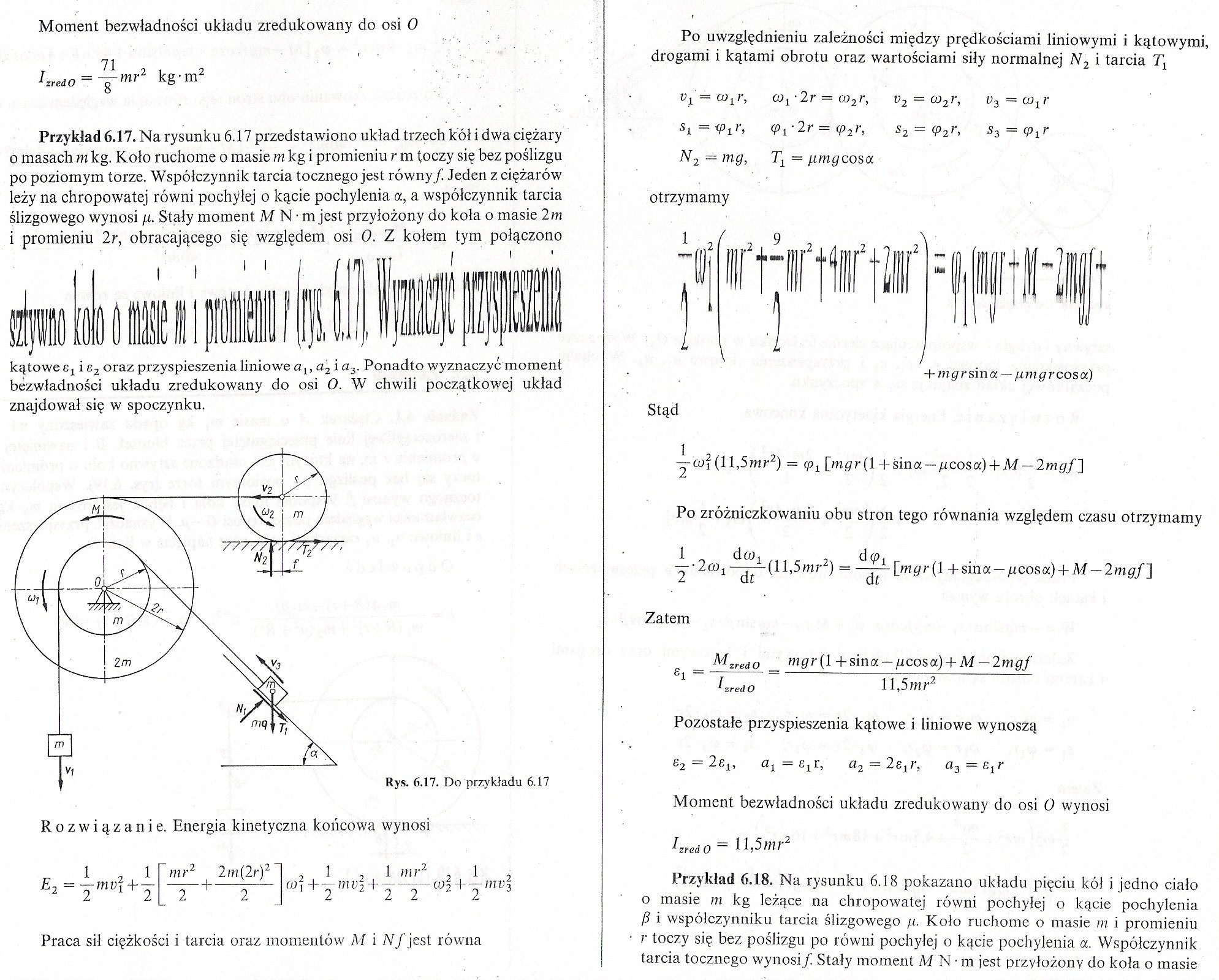
Przykład 6.17. Na rysunku 6.17 przedstawiono układ trzech kół i dwa ciężary
0 masach m kg. Koło ruchome o masie m kg i promieniu r m toczy się bez poślizgu po poziomym torze. Współczynnik tarcia tocznego jest równy f Jeden z ciężarów leży na chropowatej równi pochyłej o kącie pochylenia a, a współczynnik tarcia ślizgowego wynosi fi. Stały moment M N • m jest przyłożony do koła o masie 2 m
1 promieniu 2r, obracającego się względem osi 0. Z kołem tym połączono
i i •
A
lii Vt
|
Ml |
li) |
|
i |
tlili ( |
kątowe 8t i e2 oraz przyspieszenia liniowe alt a'2 i a3. Ponadto wyznaczyć moment bezwładności układu zredukowany do osi O. W chwili początkowej układ znajdował się w spoczynku.
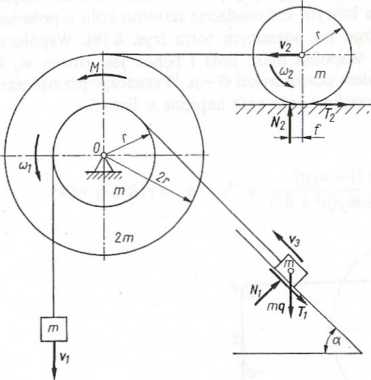
Rys. 6.17. Do przykładu 6.17
Rozwiązanie. Energia kinetyczna końcowa wynosi
E.2 = Tmyi+T
mr2 2m(2r ~2~2~
Praca sił ciężkości i tarcia oraz momentów M i Nf jest równa
Po uwzględnieniu zależności między prędkościami liniowymi i kątowymi, drogami i kątami obrotu oraz wartościami siły normalnej N2 i tarcia Ty
v, = col r, (ox -2r = co2r, v2 = co2r, v3 = co1r
sl=<p1r, <p1-2r = (p2r, s2 = (p2r, *s. ffit-
N2 = mg, Tx = fimg cosa
otrzymamy
/
+ m <7 r sin a—fimgrcosoć)
Stąd
d>f(ll,5mr2) = <px [m^r(l+śina—/icosa)+M—2mgf]
Po zróżniczkowaniu obu stron tego równania względem czasu otrzymamy
1
2
•2o)1
d ojj dt
(ll,5mr2)
dtp i dt
[mgr(l +sina—jueosa)+M—2mgf~\
Zatem
Mzred0 mgr{\ +sina—jUCOsa)+M—2mgf 6l_XI7= ll,5mr2
Pozostałe przyspieszenia kątowe i liniowe wynoszą e2 = 2ex, ax = e^, a2 = 2etr, a3=exr
Moment bezwładności układu zredukowany do osi 0 wynosi Izredo = n,5mr2
Przykład 6.18. Na rysunku 6.18 pokazano układu pięciu kół i jedno ciało o masie m kg leżące na chropowatej równi pochyłej o kącie pochylenia /? i współczynniku tarcia ślizgowego g.. Koło ruchome o masie m i promieniu r toczy się bez poślizgu po równi pochyłej o kącie pochylenia a. Współczynnik tarcia tocznego wynosi f Stały moment M N • m jest przyłożony do koła o masie
Wyszukiwarka
Podobne podstrony:
skanowanie0065 (2) Moment bezwładności układu zredukowany do osi O kg-m2 71 , , =
Scan10052 TWIERDZENIE Momenty bezwładności B*, By, B0 względem osi OX I OY oraz początku układu wspó
Biomechanika wyklady0039 B Rys.7. Moment bezwładności układu brył sztywnych względem danej osi obrot
24 luty 07 (100) Rozwiązanie Po obliczeniu zredukowanego na wał silnika momentu bezwładności układu
24 luty 07 (123) gdzie: Jzr - całkowity zredukowany moment bezwładności układu napędowego z kołem za
2
P5140211 MOMENT BEZWŁADNOŚCI BRYŁY SZTYWNEJ WZGLĘDEM OSI Momenty bezwładności względem osi ozna
Mechanika#9 J- moment bezwładności przekroju belki względem osi obojętnej w cm4 (z tablic). e - odle
Moment bezwładności ciała I względem dowolnej osi obrotu równa się sumie momentu bezwładności względ
Zadanie 6. Wyznać Dane: a Wyznaczyć moment bezwładności J Xq (w podanym układzie osi).Zadanie 7. Z
DSC03054 (2) Twierdzenie Steinera Jeżeli moment bezwładności danego ciała względem osi przechodzącej
DSC03109 (2) r—-- Jeżeli moment bezwładności danego ciała względem osi przechodzącej przez środek ma
75170 Zdjęcie089 (7) Na podstawie schematu blokowego układu, zredukowanego do postaci przedstawione]
5. Wyznacz momenty bezwładności przekroju względem zadanych osi y i z • uwaga : wystarczy zapisać ty
więcej podobnych podstron