017 2
17. Jaką pracę wykonuje siła, z którą pole magnetyczne o indukcji B oddziaływuje na cząstkę o ładunku q poruszającą się z prędkością V prostopadłą do wektora indukcji B?
Nie zostaje wykonana żadna praca, ponieważ nie zmienia się energia kinetyczna cząstki.
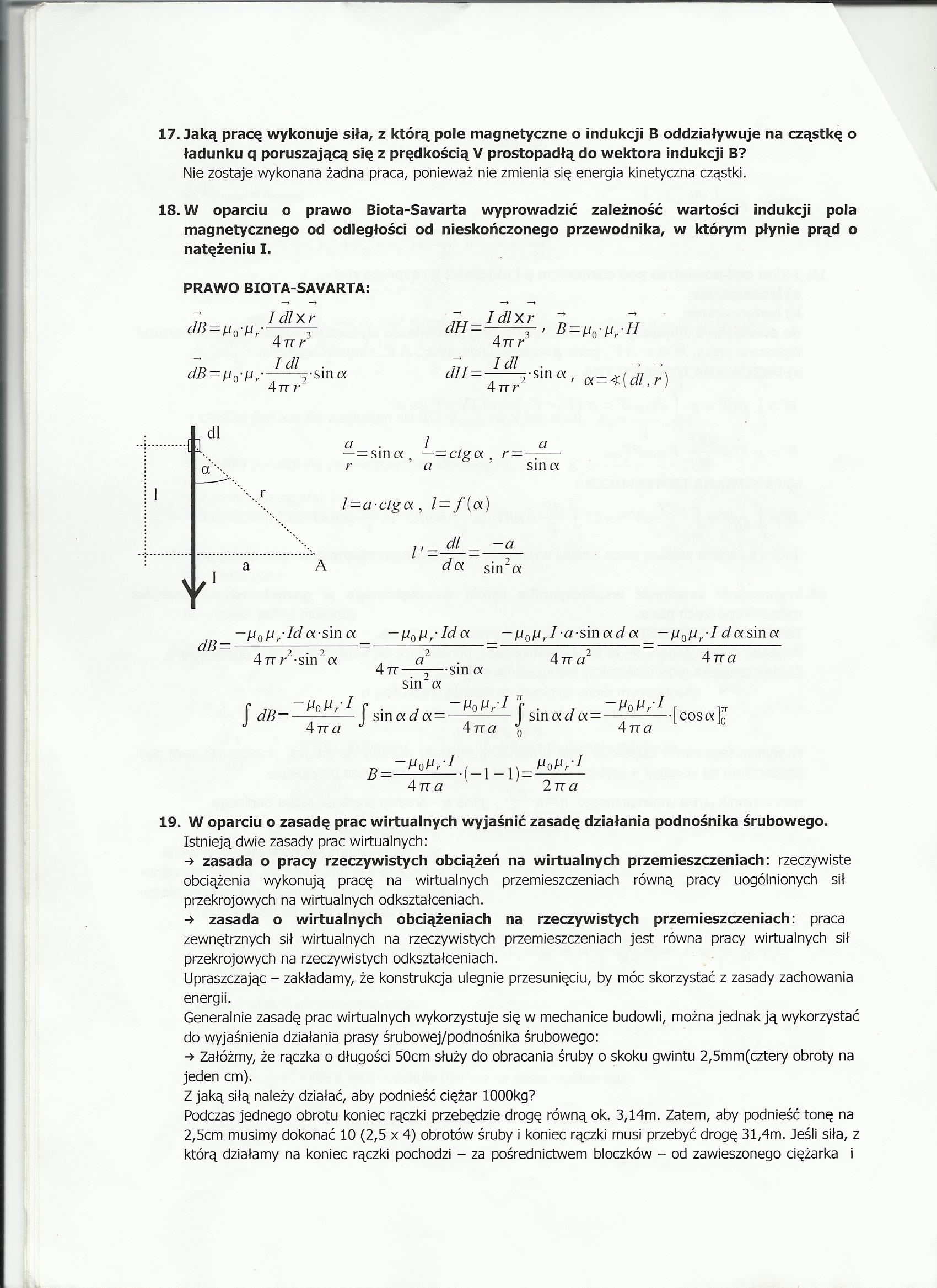
18. W oparciu o prawo Biota-Savarta wyprowadzić zależność wartości indukcji pola magnetycznego od odległości od nieskończonego przewodnika, w którym płynie prąd o natężeniu 1.
PRAWO BIOTA-SAVARTA:
dB-g0-/Jr-dB = iJ0-iJr-
I dl Xr
A u r3
I dl .
-j-sin a
4 tt r"
dH —
dH —
Aur'
■sin a
cc
ii
{dl, r)
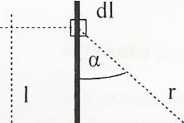
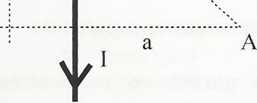
dB
a . I ci
—=sincx ——ctga r — —-
r a sin a l—a-ctga , l — /(a)
dl _ —a da sin2a
- fjQgr-Id a-sm a — g0iJr-Id a — rI-a-sm ada — g0gr-I d a sina
a 2-2
Aur -sin a
Au-
•sin a
Au a
Au a
sin a
Au ci
Hod/1
f • , ^0 ^r I f • j 1 r
J smada — — -J sin ada — — --[
A u a
Au a
cos a
2 u a
Au a
19. W oparciu o zasadę prac wirtualnych wyjaśnić zasadę działania podnośnika śrubowego.
Istnieją dwie zasady prac wirtualnych:
-> zasada o pracy rzeczywistych obciążeń na wirtualnych przemieszczeniach: rzeczywiste obciążenia wykonują pracę na wirtualnych przemieszczeniach równą pracy uogólnionych sił przekrojowych na wirtualnych odkształceniach.
zasada o wirtualnych obciążeniach na rzeczywistych przemieszczeniach: praca zewnętrznych sił wirtualnych na rzeczywistych przemieszczeniach jest równa pracy wirtualnych sił przekrojowych na rzeczywistych odkształceniach.
Upraszczając - zakładamy, że konstrukcja ulegnie przesunięciu, by móc skorzystać z zasady zachowania energii.
Generalnie zasadę prac wirtualnych wykorzystuje się w mechanice budowli, można jednak ją wykorzystać do wyjaśnienia działania prasy śrubowej/podnośnika śrubowego:
Załóżmy, że rączka o długości 50cm służy do obracania śruby o skoku gwintu 2,5mm(cztery obroty na jeden cm).
Z jaką siłą należy działać, aby podnieść ciężar lOOOkg?
Podczas jednego obrotu koniec rączki przebędzie drogę równą ok. 3,14m. Zatem, aby podnieść tonę na 2,5cm musimy dokonać 10 (2,5 x 4) obrotów śruby i koniec rączki musi przebyć drogę 31,4m. Jeśli siła, z którą działamy na koniec rączki pochodzi - za pośrednictwem bloczków - od zawieszonego ciężarka i
Wyszukiwarka
Podobne podstrony:
ScanImage003 (15) 1. Jaką pracę wykona siła F = 5 N wykonując pracę po torze
W,P,E, zas zach E 1 1. Praca, moc, energia, zasada zachowania energii mechanicznej Jaką pracę wyko
482 XIII. Całki niewłaściwe (według prawa Newtona). Jaką pracę A wykona siła Fprzy przesunięciu punk
UWAGA: to jest siła którą kula musi działać aby utrzymać cząstkę na swej powierzchni
2.2 Pole magnetyczne, indukcja elektromagnetyczna Pole magnetyczne - siła Lorentz’a Siła
16. Pole magnetyczne, indukcja Wybór i opracowanie Marek Chmielewski 16.1. Znaleźć indukcje pola
Pole magnetyczne indukcja Odmienne działanie siły Lorentza na cząstki o przeciwnych ładunkach obrazu
Stałe pole magnetyczne od stoją na
Kolokwium 2 zestaw+ Zad. 1 Elektron o energii kinetycznej E wlatuje w jednorodne pole magnetyczne
pole magnetyczne 1 Pole magnetyczne Cząstka a wpada w pole magnetyczne o indukcji 0,02 T prostopadle
32 2 Elektron wpada w-jednorodne pole magnetyczne o indukcji B=2.7- 10‘‘TpodkątemcF5o do linii pola
41(1) Moc Moc związana t działaniem siły. jest co szybkość. / jaką silu wykonuje pracę nad ciałem. J
MechanikaE0 Przykład. Obliczyć pracę, jaką wykonuje siła ciężkości działająca na p
Co to znaczy że ciało wykonuje pracę jednego dżula? ■ 1J jest to praca, jaką wykonuje siła o wartośc
więcej podobnych podstron