047 4

GMP
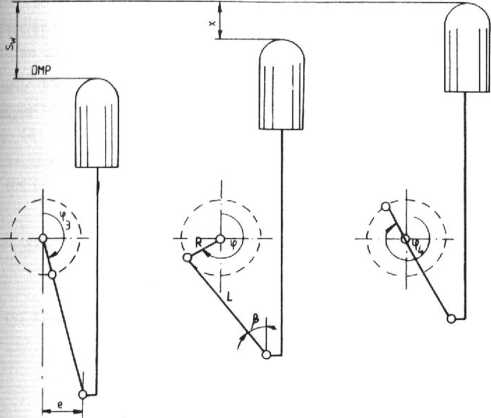
Rys. Z.6. Schemat układu napędowego wypornika w mechanizmie romboidalnym
Uwzględniając zależności geometryczne przedstawione na rys. 2.6, odpowiednie funkcje opisujące ruch wypornika kształtują się następująco:
- przemieszczenie wypornika liczone od GMP
1
x = R \ 1
cosy - cosy + ^ cosg
3 A
gdzie ^ - kąt obrotu wykorbienia, w którym wypornik osiąga DMP
sin®
k X
1 + X
. ( k X 1 1
<P3 = arcsin t + ^ I , przy czym -^-ir < <P3 < n
- chwilowe kątowe wychylenie korbowodu od położenia równoległego do osi cy
lindra
sin0 = X (k - siny) , gdy k > 1
0 - arcsin £ X (k - siny) j
(2.23)
(2.24)
- kąt y , przy którym wypornik znajduje się w GMP
sin®
k X
1 - X
. [ k X \
pĄ = arcsin I--Ł A I , przy
czym
3rr
(2.25)
(2.26)
51
Wyszukiwarka
Podobne podstrony:
046 5 GMP Rys. 2.5. Schemat układu napędowego tłoka w mechanizmie romboidalnym Chwilowe kątowe wychy
IMAG0065 Rys.2. Schemat układu mechanicznego 3. Sprawozdanie Sprawozdanie powinno zawierać: 9 modele
32 Mechanika Rys. 1-4-1: Schemat układu do badania drgań wahadeł sprzężonych. Ng - mglsin(—ipa) ~
Image 76 80 silnik z magnesami trwałymi w obwodzie wzbudzenia Rys. 3.36. Schemat układu napędowego D
Skanuj$2 Układ limfatyczny (chłonny) Rys. Schemat układu limfatycznego człowieka imfa □
IMG050 50 Rys. 4.8. Schemat układu do pomiaru częstotliwości metody figur Liaaajoue i osi y. Pewna t
skanuj0007 14 Rys. 7.4. Schemat układu mostka Thomsona Mostek Thomsona posiada rezystor wzorcowy czt
Rozdział 18 -- Rys. 6. Schemat układu pomiarowego z wieloczujnikową głowicą pomiarową. Wyniki
Badanie elementów układów automatycznego sterowania Rys. 7. Schemat układu pomiarowego do wyznaczani
skanuj0011 (247) 67 Ćwiczenie 6 Rys. 6.1. Schemat układu do pomiaru prędkości dźwięku w powietrzu Zn
więcej podobnych podstron