133 2
260
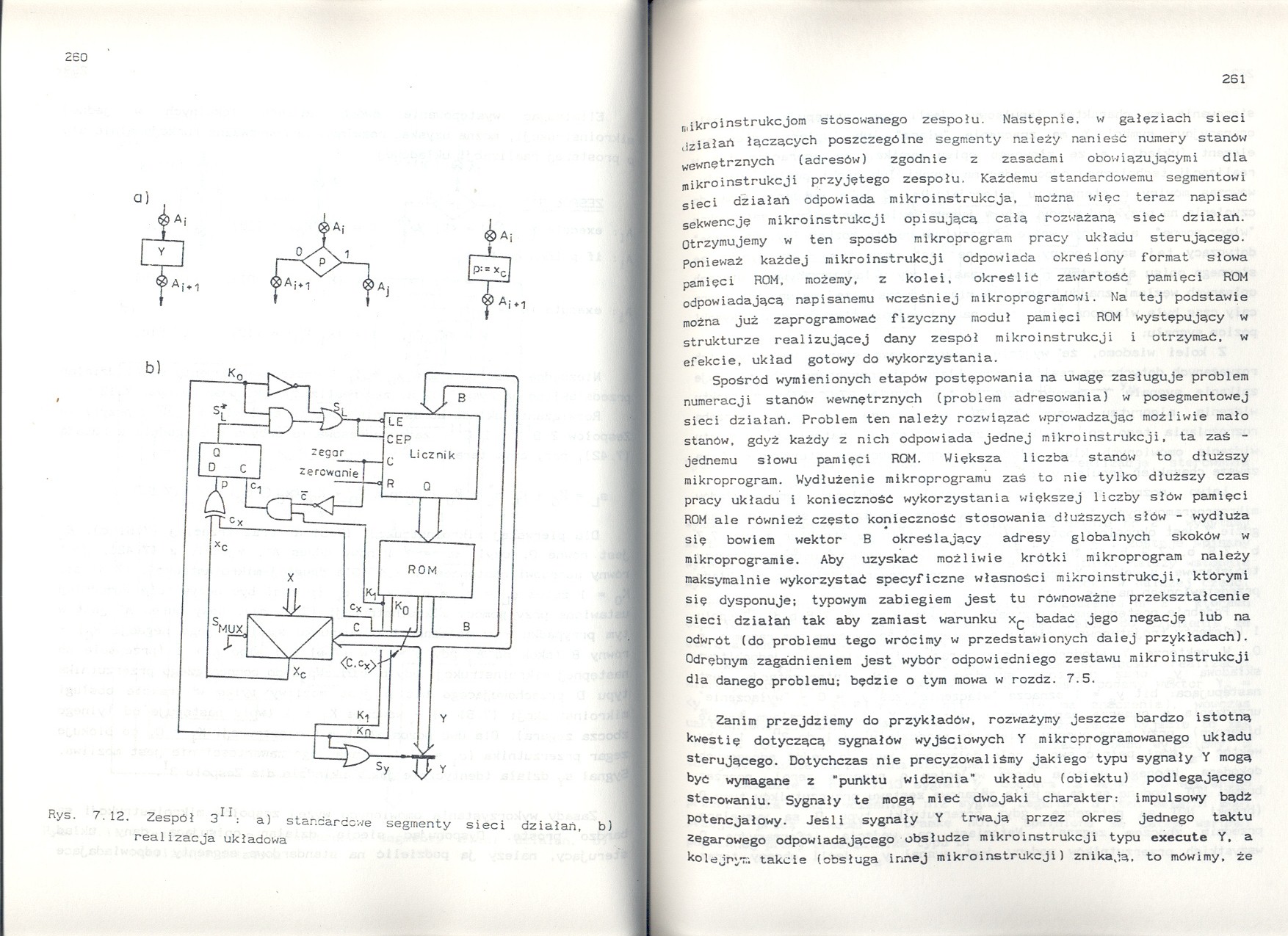
Rys.
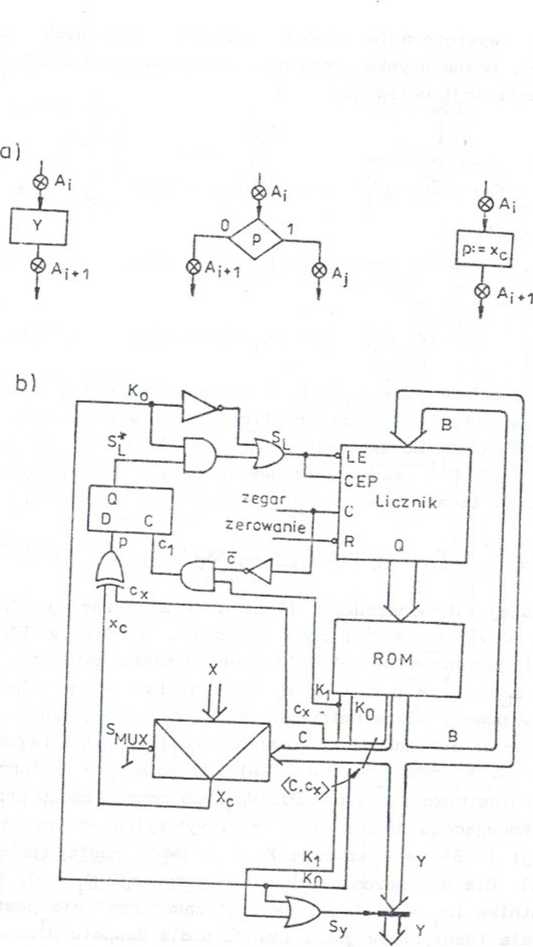
12. Zespół 311: a) standardowe rea1 i zacja układowa
segmenty sieci działań.
b)
ikroinstrukcjom stosowanego zespołu. Następnie, w gałęziach sieci Jziałari łączących poszczególne segmenty należy nanieść numery stanów wewnętrznych (adresów) zgodnie z zasadami obowiązującymi dla mikroinstrukcji przyjętego zespołu. Każdemu standardowemu segmentowi sieci działań odpowiada mikroinstrukcja, można więc teraz napisać sekwencję mikroinstrukcji opisującą całą rozważaną sieć działań. Otrzymujemy w ten sposób mikroprograra pracy układu sterującego, ponieważ każdej mikroinstrukcji odpowiada określony format słowa pamięci ROM. możemy, z kolei, określić zawartość pamięci ROM odpowiadającą napisanemu wcześniej mikroprogramowi. Na tej podstawie można już zaprogramować fizyczny moduł pamięci ROM występujący w strukturze realizującej dany zespół mikroinstrukcji i otrzymać, w efekcie, układ gotowy do wykorzystania.
Spośród wymienionych etapów postępowania na uwagę zasługuje problem numeracji stanów wewnętrznych (problem adresowania) w posegmentowej sieci działań. Problem ten należy rozwiązać wprowadzając możliwie mało stanów, gdyż każdy z nich odpowiada jednej mikroinstrukcji, ta zaś -jednemu słowu pamięci ROM. Większa liczba stanów to dłuższy mikroprogram. Wydłużenie mikroprogramu zaś to nie tylko dłuższy czas pracy układu i konieczność wykorzystania większej liczby słów pamięci ROM ale również często konieczność stosowania dłuższych słów - wydłuża się bowiem wektor B określający adresy globalnych skoków w mikroprogramie. Aby uzyskać możliwie krótki mikroprogram należy maksymalnie wykorzystać specyficzne własności mikroinstrukcji, którymi się dysponuje; typowym zabiegiem jest tu równoważne przekształcenie sieci działań tak aby zamiast warunku badać jego negację lub na odwrót (do problemu tego wrócimy w przedstawionych dalej przykładach). Odrębnym zagadnieniem jest wybór odpowiedniego zestawu mikroinstrukcji dla danego problemu; będzie o tym mowa w rozdz. 7.5.
Zanim przejdziemy do przykładów, rozważymy jeszcze bardzo istotną kwestię dotyczącą sygnałów wyjściowych Y mikroprogramowanego układu sterującego. Dotychczas nie precyzowaliśmy jakiego typu sygnały Y mogą być wymagane z "punktu widzenia" układu (obiektu) podlegającego sterowaniu. Sygnały te mogą mieć dwojaki charakter: impulsowy bądź Potencjałowy. Jeśli sygnały Y trwają przez okres jednego taktu Zegarowego odpowiadającego obsłudze mikroinstrukcji typu execute Y, a kolejnym, takcie (obsługa innej mikroinstrukcji) znikają, to mówimy, że
Wyszukiwarka
Podobne podstrony:
20464 Strona 048 Silnik Rys. 1.12. Zespół kolektora dolotowego silnika 1,5 DOHC 1 — kolektor dolotow
194(4) Rys. 12.7. Zespól reflektora z kierunkowskazem 1 — reflektor, 2 — uszczelka. 3 — szkło. 4 — ż
Standardowe cięcie lub tak jak dla pieczątek z pochyleniem - Rys. 12., wybranie kolorów lub odpowied
img043 (7) - 133 - 133 Rys. 12 h«»£ Tabela 1 Rodzaj odbiornika Pomianj Obliczenia U*aqi
50 -lecie Polskiej Radiolokacji Rys. 8.12. Widok apertury anteny AFF-600 Rys. 8.10. Zespół PZK-20 z
490 2 12. ELEKTROWNIE WODNE Rys. 12.17. Porównanie przekroju budynków elektrowni pompowej z zespołem
127 3 248 Rys. 7.6. Zespół 1: a) standardowy segment sieci działań, b) realizacja układowa czyi i A
128 2 250b) Rys. 7.7. Zespól 2A: a) standardowe segmenty sieci działań, b) realizacja układowa 1 •
Nr 12 PRZEGLĄD GÓRNICZY Nr 12 PRZEGLĄD GÓRNICZY Rys. 5. Izolinic złożonej niepewności standardowej
skanuj0019 (234) A A-A Rys. 2.11. Układ żeber stali zbrojeniowej 18G2 (A—II) Rys. 2.12. Układ żeber
więcej podobnych podstron