170 4
334
3] wyznaczyć minimalną tablicę przejść i wyjść automatu Moore'a oraz tablice przejść automatu Mealy'ego, pamiętając, że stan stabilny w tablicy pierwotnej pozostaje stabilny w tablicy minimalnej; wyboru, który z automatów jest lepszy w realizacji, można dokonać dopiero po analizie obu automatów,
4) wyznaczyć tablicę wyjść automatu Mealy’ego.
Przykład 9.3 (cd (1) Przykładu S.l)
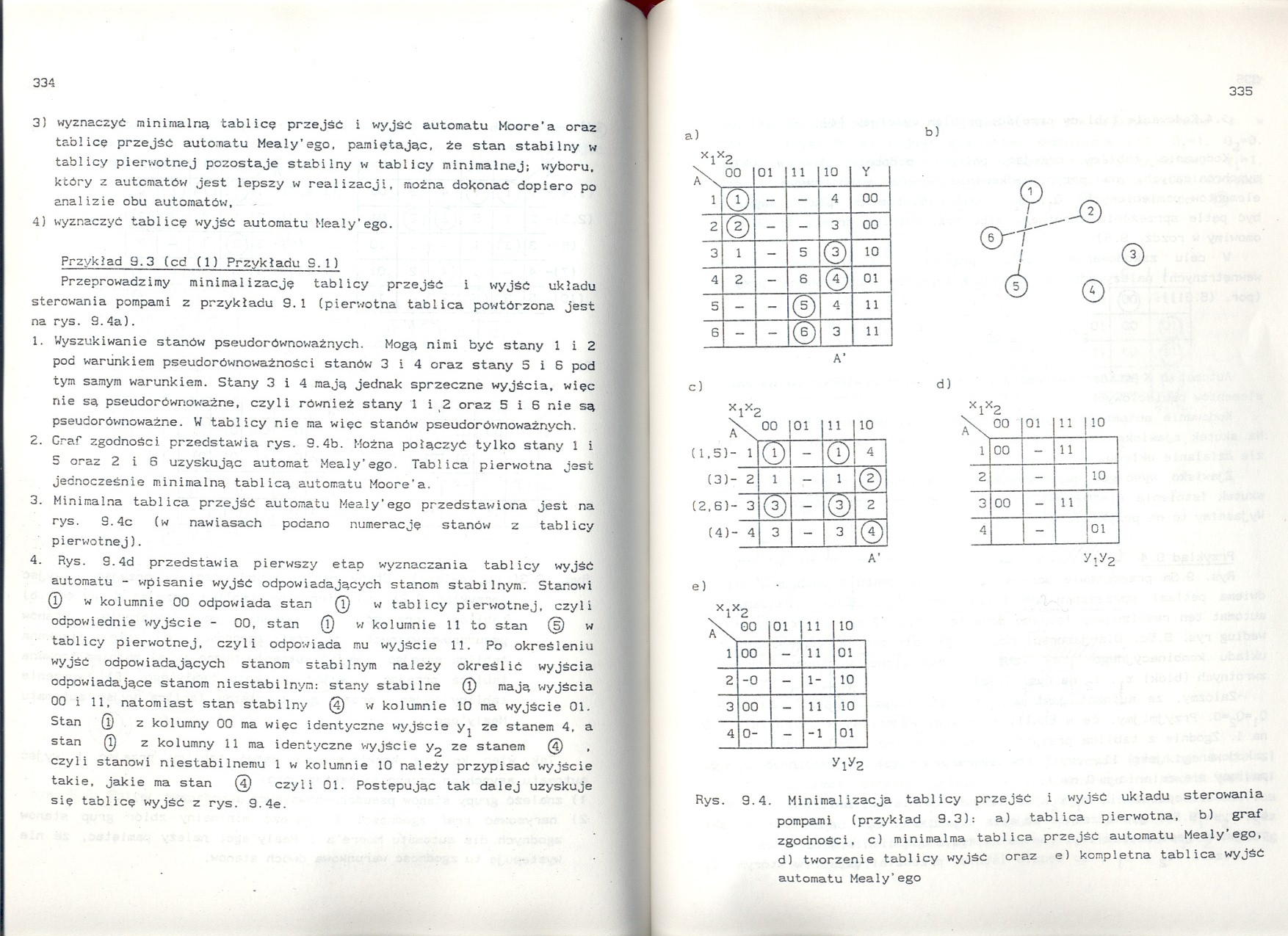
Przeprowadzimy minimalizację tablicy przejść i wyjść układu
sterowania pompami z przykładu 9.1 (pierwotna tablica powtórzona jest
na rys. S.4a).
1. Wyszukiwanie stanów pseudorównoważnych. Mogą nimi być stany 1 i 2 pod warunkiem pseudorównoważności stanów 3 i 4 oraz stany 5 i 6 pod tym samym warunkiem. Stany 3 i 4 mają jednak sprzeczne wyjścia, więc nie są pseudorównoważne, czyli również stany 1 i 2 oraz 5 i 6 nie są pseudorównoważne. W tablicy nie ma więc stanów pseudorównoważnych.
2. Graf zgodności przedstawia rys. 9.4b. Można połączyć tylko stany 1 i 5 oraz 2 i 6 uzyskując automat Mealy’ego. Tablica pierwotna jest jednocześnie minimalną tablicą automatu Moore'a.
3. Minimalna tablica przejść automatu Meaiy’ego przedstawiona jest na rys. 9.4c (w nawiasach podano numerację stanów z tablicy pierwotnej).
4. Rys. 9.4d przedstawia pierwszy etap wyznaczania tablicy wyjść
automatu - wpisanie wyjść odpowiadających stanom stabilnym. Stanowi (I) w kolumnie 00 odpowiada stan Q w tablicy pierwotnej, czyli odpowiednie wyjście - 00, stan (l) w kolumnie 11 to stan (§) w
tablicy pierwotnej, czyli odpowiada mu wyjście 11. Po określeniu wyjść odpowiadających stanom stabilnym należy określić wyjścia odpowiadające stanom niestabilnym: stany stabilne (£) mają wyjścia 00 i 11, natomiast stan stabilny @ w kolumnie 10 ma wyjście 01. Stan (l) z kolumny 00 ma więc identyczne wyjście y^ ze stanem 4, a stan 0 z kolumny 11 ma identyczne wyjście yg ze stanem (4) ,
czyli stanowi niestabilnemu 1 w kolumnie 10 należy przypisać wyjście takie, jakie ma stan @ czyli 01. Postępując tak dalej uzyskuje się tablicę wyjść z rys. 9.4e.
C )
X1X2
d)
|
a" |
"oo |
01 |
11 |
10 |
X |
00 |
01 |
U |
10 | |
|
(1.5)- |
1 |
© |
- |
© |
4 |
1 |
00 |
- |
1 1 | |
|
(3)- |
2 |
1 |
- |
1 |
© |
2 |
- |
10 | ||
|
(2.6)- |
3 |
© |
- |
© |
2 |
3 |
00 |
- |
11 | |
|
(4)- |
4 |
3 |
- |
3 |
© |
4 |
- |
01 |
b)
xlx2
|
\ |
00 |
01 |
11 |
10 |
Y |
|
1 |
© |
- |
- |
4 |
00 |
|
2 |
0 |
- |
- |
3 |
00 |
|
3 |
1 |
- |
5 |
© |
10 |
|
4 |
2 |
- |
6 |
© |
01 |
|
5 |
- |
- |
© |
4 |
11 |
|
6 |
- |
- |
© |
3 |
11 |
.J3
e)
X1X2
|
\ 00 |
01 |
11 |
10 | |
|
1 |
00 |
- |
11 |
01 |
|
2 |
-0 |
- |
1- |
10 |
|
3 |
00 |
- |
11 |
10 |
|
4 |
0- |
- |
-1 |
01 |
y^2
Rys. 9.4. Minimalizacja tablicy przejść i wyjść układu sterowania pompami (przykład 9.3): a) tablica pierwotna, b) graf zgodności, c) minimalma tablica przejść automatu Mealy’ego, d) tworzenie tablicy wyjść oraz e) kompletna tablica wyjść automatu Mealy’ego
Wyszukiwarka
Podobne podstrony:
044 4 86 Przykład 5.24 (cd (1) Przykładu 5.5) [4] Na rys. 5.35 a jest pokazana tablica przejść i wyj
18957 Untitled Scanned 38 - 76 - rys,3-19®, tablice przejść i wyjść układu Mealy*«ge - na rys.3.19b,
092 093 U Rys. 3«32. Wykres czasowy, graf oraz tablica przejść/wyjść dwójki liczącej (przykład
II ° II1 —* 9o II 92 II 9o *9i 9i 9i 92
167 3 328 pracę układu, znaleźć można m. łn. w (4). Tablice przejść i wyjść opisujące układy
Automat Moore‘a Dużo bardziej scislym sposobem opisu działania automatów jest graf przejść i wyjsc.
047 3 92 Rys. 5.39. Przykładowe grafy automatów elementarnych o pełnym systemie przejść i wyjść i tr
minimalne zbiory argumentow 2 wyr booloweskie 4. Dla funkcji f opisanej tablicą 1 zmienne niezbędn
Untitled Scanned 50 - 100 - - 100 - Rya.3.34. Rysunek do przykładu 5: a) tablica p
2termin2004zima zad1 UCYF 9.02.04 Zad 1. Automat o podanej tablicy przejść zrealizować na pamięci RO
3.4. GRAF AUTOMATU, TABELE PRZEJŚĆ / WYJŚĆ Definicja układu kombinacyjnego była stosunkowo prosta -t
Graf: Tabele przejść i wyjść: Uwagi: 1) Jest naturalne, że liczniki są automatami
Image084 — sporządzić tablicę przejść, — sporządzić tablice
więcej podobnych podstron