dew0022
44
' - ustawić kompas główny na kursie kompasowym północnym lub po
łudniowym? zmierzyć namiar na wybrany obiekt,
- przechylić kompas o kąt przechyłu i; zmierzyć namiar na ten sam obiekt? podnosząc lub obniżając magnes pionowy doprowadzić namiar do wartości zmierzonej przed przechyłem statku.
Część B
1,. Zanotować kurs magnetyczny budowy statku podany przez prowadzącego,
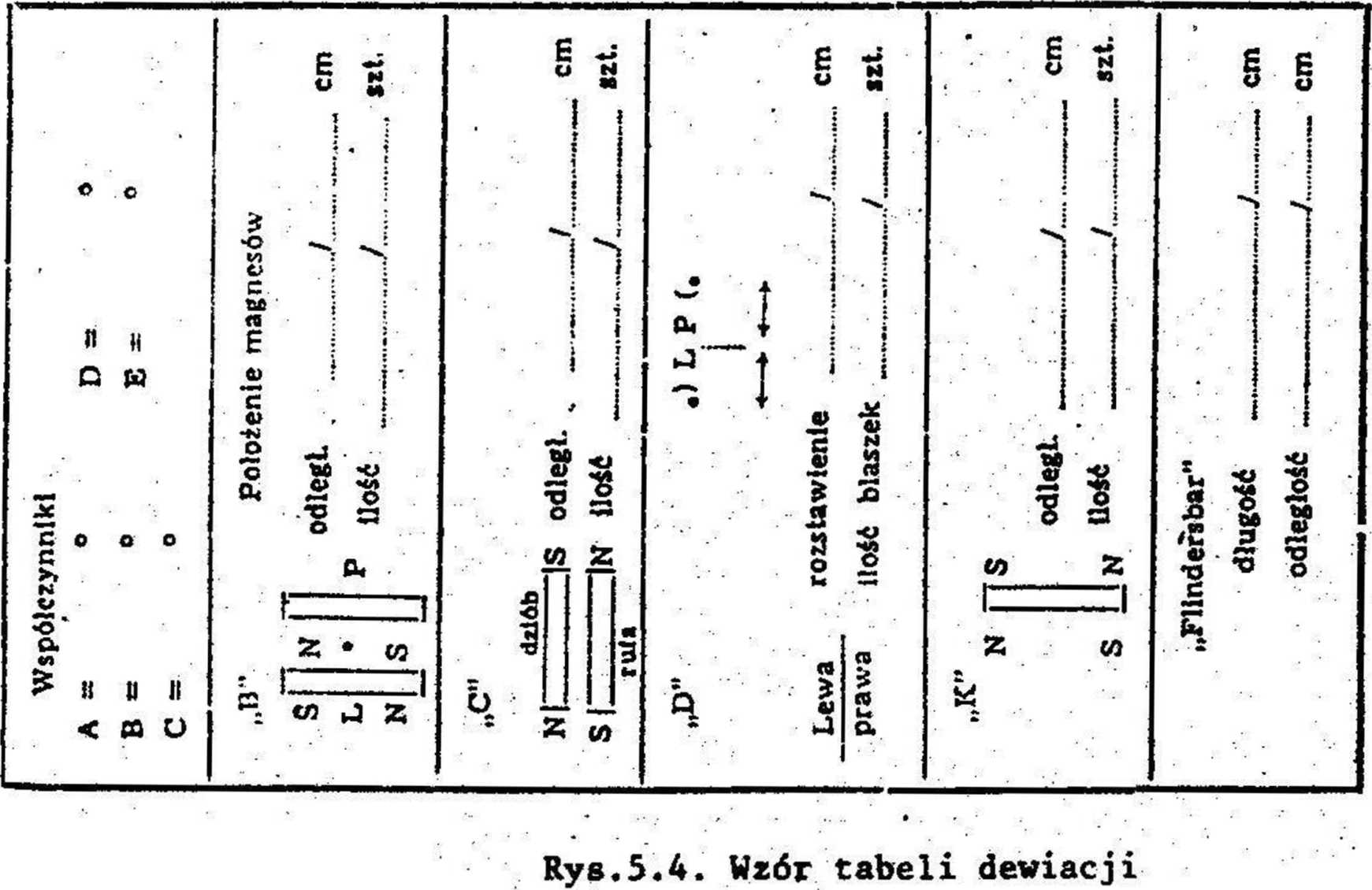
2, Wyznaczyć współczynniki dewiacji B i C.
3. Obliczyć współczynnik dewiacji B1 ze wzoru:
tga
CS B1 !
(5.8)
4. Wyznaczyć współczynnik B2:
(5.9)
B2 = B - B1
4
Skompensować dewiacje wywołaną magnetyzmem zmiennym za pomocą korektora sztaby Flindersa o wartość obliczoną ze wzoru (5.9). Sztabą wzdłużną skompensować dewiacje typu B1 o wartość obliczoną w punkcie 3, natomiast sztabami poprzecznymi usunąć dewiacje półokreźną typu C.
• - • ■*
5. Usunąć sztaby symulujące i kompensujące dewiacje typu B1, sprawdzić prawidłowość przeprowadzonej kompensacji dewiacji B2.
Część C
#
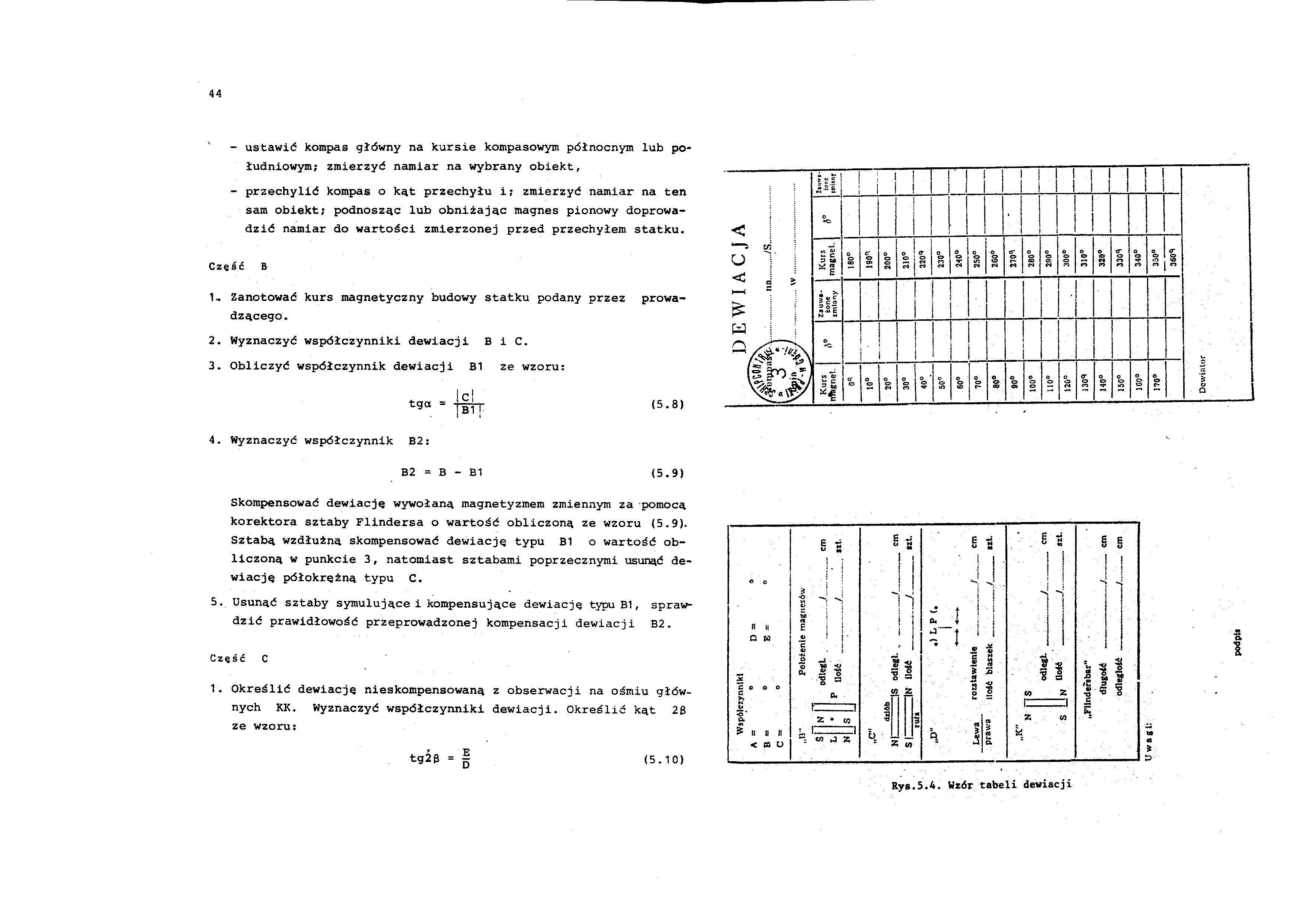
1. Określić dewiacje nieskompensowaną z obserwacji na ośmiu głównych KK. Wyznaczyć współczynniki dewiacji. Określić kąt 28 ze wzoru:
<
w
a
|
1 > o c r c * |
f" | |
J 1 |
i |
' |
! i |
-r— |
i 1 |
1 1 | |||||||||||
|
O |
1 |
. ' ] |
i |
4 | |||||||||||||||
|
Kurs magnet, |
O O CD |
c o O) |
o o o CS |
O CS |
220 ^ |
O co CJ |
0 o N |
O o irt CS |
i o o o CS |
cr o N |
o o GD CS |
o c: CS |
o o o .o |
o o •“+ co |
o o CS co |
<r o co CO |
o o co |
o o IJO o |
<r s 1” |
|
1 >> J <y C S CJ2 3 o~ *»•>! C M H |
1 |
i 1 i |
i ■ |
4 |
c |
- |
. | ||||||||||||
|
O |
’ |
i i |
• | ||||||||||||||||
|
■ -1 4Ś*A to cu ss “i |
O' o |
o |
o o <S |
o o co |
o # o |
D O iO |
O O CD |
0 o r- |
o s. |
O O <x |
O O o |
o o |
o o CS |
<r o co •—ł |
o o •-4 |
o o *o •—< |
o o o |
o o c- | |
o
Q
•«nf
t*
*
podpis
i
Wyszukiwarka
Podobne podstrony:
Ustawienia stali Lokalizacja polecenia zmiany ustawień w menu głównym i na pasku zadań : Pokaż pasek
img254 (9) Ćwiczenia zostały umieszczone na końcu każdego rozdziału lub po przedstawieniu poszczegól
DSCF9326 Dany jest układ magnetyczny (patrz rys 1.). Napisać równanie wł dt8 kompasu K na kursie 090
WtPKBWM Raport końcowy - WIM 34/13 Po wybraniu kotwicy statek ustawił się na kursi
60 U rządy. 1) Poczta w Zakopanem znajduje się na miejscu; urząd główny na Krupówkach 64; filja na d
nych i elektronicznych jest tekst główny, na który, w przypadku wydawnictw informacyjnych typu
skanuj0085 152 SANATORIUM POD KLEPSYDRĄ Przed kawiarnią ustawiono już stoliki na bruku. Panie siedzi
SAVE0519 [] ’ios(q kontrolę ustawienia reflektorów asymetrycznych na masce należy przepro-radzić w n
skanuj0043 (27) Roślinność siedlisk leśnych 84 powierzchni naszych lasów. Jest gatunkiem głównym na
strD (2) 44 słomy, maczanej w glinie, na trwalszych budynkach — z blachy.. Dachówka i gont na dach s
więcej podobnych podstron