DSCF4147
Rezystancja R odnosi się do obwodu wirnika. Zgodnie ze schematem karanym na rys. 1.30fc, można zapisać
R — Rg + R% + Rg
*s-Rb RS + Rb
0.331
Prąd zwarciowy, wyliczony na podstawie równań (1.32) i (1.33), zależy aj rezystancji bocznikującej obwód wzbudzenia Rb-
Przebieg charakterystyk mechanicznych silnika szeregowego przy osłabia, niu wzbudzenia przedstawiono na rys. 1.316.
W silnikach prądu stałego w prosty sposób uzyskać można zmianę kierua ku wirowania twomika. Z zasady działania silnika, określonej regułą lewej dłonj wynika, że w celu zmiany kierunku wirowania silnika prądu stałego naleft zmienić jeden tylko parametr ruchu, tzn. albo zmienić kierunek prądu w twomi. ku przy nie zmienionym kierunku wzbudzenia bądź też zmienić kierunek wzbu dzenia przy nie zmienionym kierunku prądu w twomiku. Przy zmianie kieruu.
ków obu tych wielkości naraz kierunej ■ wirowania silnika zgodnie . z regułj lewej dłoni pozostaje nie zmieniony.
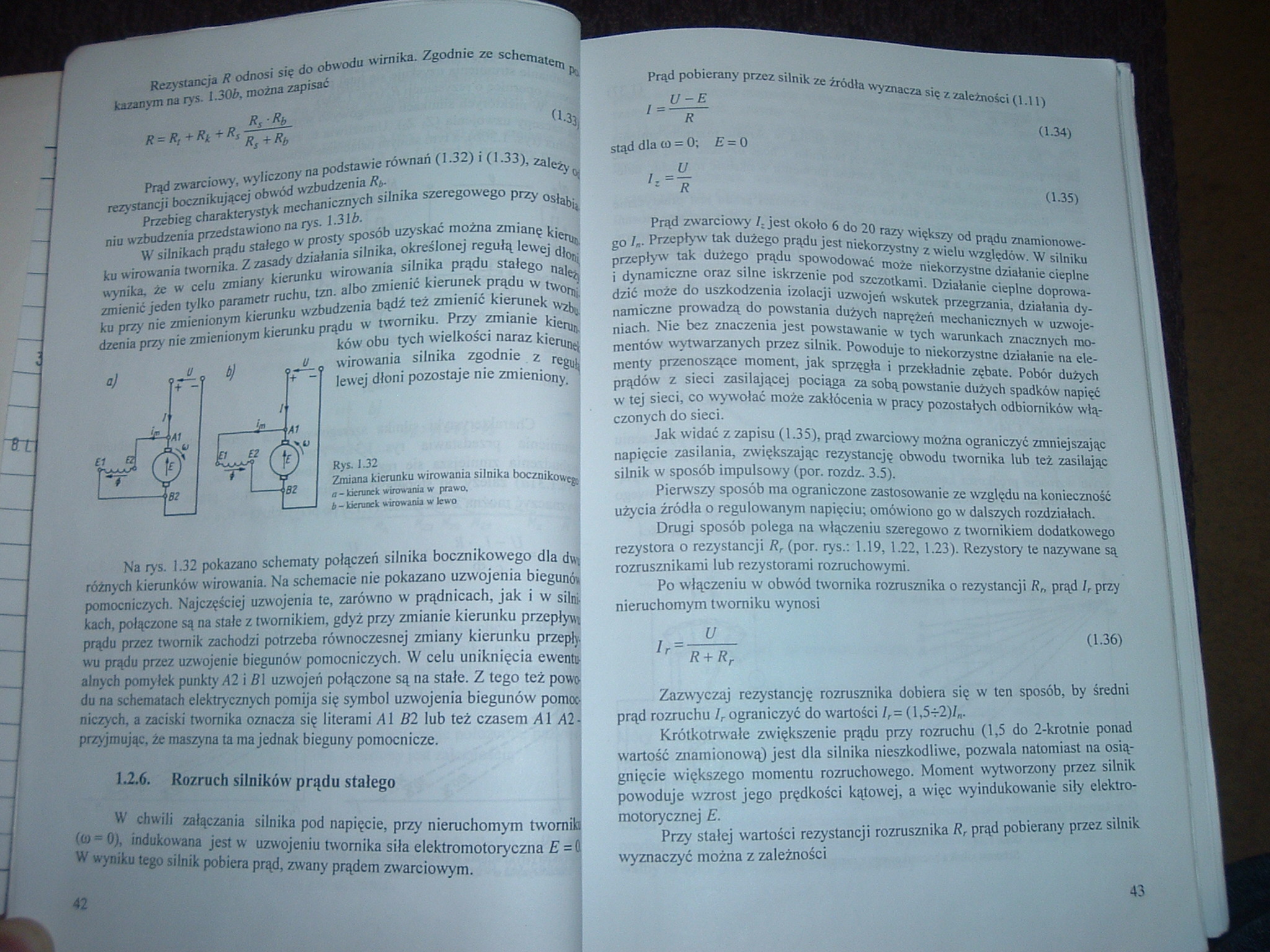
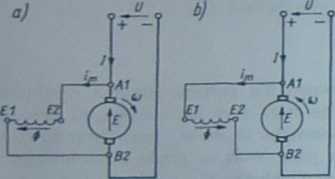
Rys. l .32
Zmiana kierunku wirowania silnika bocznikowe# a - kierunek wirowania w prawo. b - kierunek wirowania w lewo
Na rys. 1.32 pokazano schematy połączeń silnika bocznikowego dla dwi różnych kierunków wirowania. Na schemacie nie pokazano uzwojenia bieguna pomocniczych- Najczęściej uzwojenia te, zarówno w prądnicach, jak i w silni-; kach, połączone są na stałe z twomikiem, gdyż przy zmianie kierunku przepływ prądu przez twomik zachodzi potrzeba równoczesnej zmiany kierunku przepływu prądu przez uzwojenie biegunów pomocniczych. W celu uniknięcia ewentuj alnych pomyłek punkty A2 i BI uzwojeń połączone są na stałe. Z tego też powodu na schematach elektrycznych pomija się symbol uzwojenia biegunów pomooj niczych. a zaciski twomika oznacza się literami Al B2 lub też czasem Al A2-przyjmując, że maszyna ta ma jednak bieguny pomocnicze.
1.2.6. Rozruch silników prądu stałego
W chwili załączania silnika pod napięcie, przy nieruchomym twomih (to = 0), indukowana jest w uzwojeniu twomika siła elektromotoryczna £ = Q W wyniku tego silnik pobiera prąd, zwany prądem zwarciowym.
Prąd pobierany przez silnik ze źródła wyznacza się z zależności (1.11)

R
(1-34)
stąd dla (0 = 0; E = 0

R
(1.35)
Prąd zwarciowy jest około 6 do 20 razy większy od prądu znamionowe* go /„. Przepływ tak dużego prądu jest niekorzystny z wielu względów. W silniku przepływ tak dużego prądu spowodować może niekorzystne działanie cieplne i dynamiczne oraz silne iskrzenie pod szczotkami. Działanie cieplne doprowadzić może do uszkodzenia izolacji uzwojeń wskutek przegrzania, działania dynamiczne prowadzą do powstania dużych naprężeń mechanicznych w uzwojeniach. Nie bez znaczenia jest powstawanie w tych warunkach znacznych momentów wytwarzanych przez silnik. Powoduje to niekorzystne działanie na elementy przenoszące moment, jak sprzęgła i przekładnie zębate. Pobór dużych prądów z sieci zasilającej pociąga za sobą powstanie dużych spadków napięć w tej sieci, co wywołać może zakłócenia w pracy pozostałych odbiorników włączonych do sieci.
Jak widać z zapisu (1.35), prąd zwarciowy można ograniczyć zmniejszając napięcie zasilania, zwiększając rezystancję obwodu twomika lub też zasilając silnik w sposób impulsowy (por. rozdz. 3.5).
Pierwszy sposób ma ograniczone zastosowanie ze względu na konieczność użycia źródła o regulowanym napięciu; omówiono go w dalszych rozdziałach.
Drugi sposób polega na włączeniu szeregowo z twomikiem dodatkowego rezystora o rezystancji Rr (por. rys.: 1.19,1.22, 1.23). Rezystory te nazywane są rozrusznikami lub rezystorami rozruchowymi.
Po włączeniu w obwód twomika rozrusznika o rezystancji Rn prąd Ir przy nieruchomym twomiku wynosi

(1.36)
Zazwyczaj rezystancję rozrusznika dobiera się w ten sposób, by średni prąd rozruchu Ir ograniczyć do wartości /,= (I,5-r2)/„.
Krótkotrwałe zwiększenie prądu przy rozruchu (1,5 do 2-krotnie ponad wartość znamionową) jest dla silnika nieszkodliwe, pozwala natomiast na osiągnięcie większego momentu rozruchowego. Moment wytworzony przez silnik powoduje wzrost jego prędkości kątowej, a więc wyindukowanie siły elektromotorycznej E.
Przy stałej wartości rezystancji rozrusznika R, prąd pobierany przez silnik wyznaczyć można z zależności
Wyszukiwarka
Podobne podstrony:
153 3 Silnik NS03M - Mitsubishi Electrical Co., Ltd. Zgodnie ze schematem przedstawionym na rys. 6.6
PRAWO KARNE - to sformułowanie bardzo ogólne, odnosi się do całej gałęzi prawa. Mówiąc o tym mamy na
Dokumentacja meduzna dzieli się na: indywidualna -odnosi się do każdego pacjenta korzystającego ze
Termin POZYCJA KONKURENCYJNA odnosi się do udziału w rynku i jego zmian w tym zakresie na tle główny
Procedura (realizacja na oprogramowaniu wirtualnym) □ 1. Zgodnie ze schematem przedstawionym na rysu
1. Połączyć układ zgodnie ze schematem przedstawionym na rysunku 4 2.
Photo0014 Przedstawiona na rysunku 3.14 charakterystyka przepływu odnosi się do pompy, której wirn
Prawo Ohma odnosi się do odcinka obwodu przewodzącego prąd (rys. 8.), który napotyka na opór elektry
Image 013 W9-9 6.2.3. Włączanie dodatkowej rezystancji do obwodu wirnika silnika pierścieniowego Włą
Zasada przeprowadzenia ćwiczenia zgodnie z decyzją ćwiczących odnosi się do: -
więcej podobnych podstron