mechanika15
Przy próbie przesunięcia tarczy za pomocą poziomej siły P pojawia się rozłożona siła tarcia, którą zastępujemy siłą skupioną T (rys. I.36b). W stanie równowagi granicznej słuszne jest prawo Coulomba:
T • pN, 0 < p < l (1.48)
gdzie p jest współczynnikiem tarcia ślizgowego (statycznego rozwiniętego). Po przekroczeniu równowagi granicznej następuje ruch ciała w kierunku dzia łania siły P. Siła tarcia ma zwrot przeciwny do siły P.
Układ sił działających na tarczę traktuje się w przybliżeniu jako płaski zbieżny układ sil. W stanie równowagi granicznej spełnione są 2RRS:
(1.49)
X = 0: P-T • 0 =* P = T 53^ = 0: N-Q = 0=>N = Q Po uwzględnieniu T = pN = pQ, otrzymuje się
P - Pv - (1^50)
Kąt tarcia (p jest zdefiniowany związkiem
P ■ tg<p (1.51)
Siłę przesuwającą P - P wyznaczamy indywidualnie w danej konfiguracji.
o*
Tarcie toczne (opór toczenia)
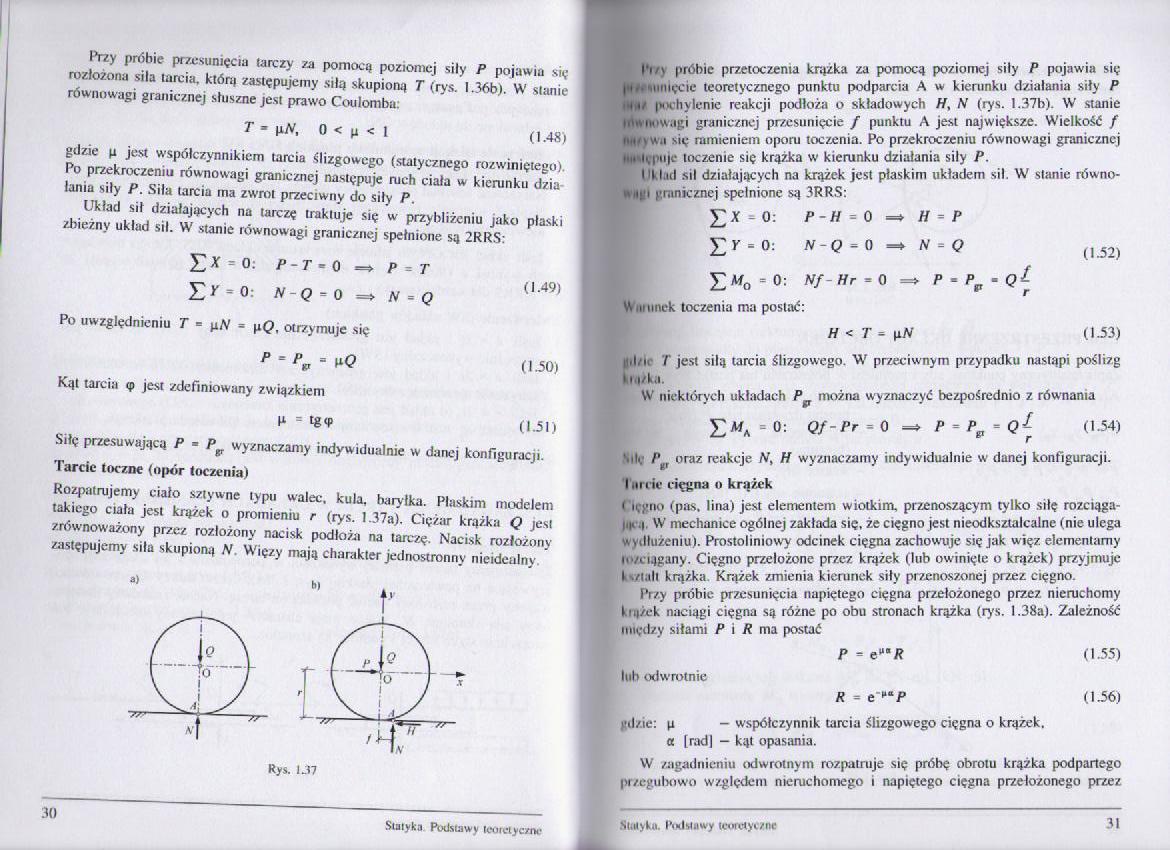
Rozpatrujemy ciało sztywne typu walec, kula, baryłka. Płaskim modelem takiego ciała jest krążek o promieniu r (rys. 1.37a). Ciężar krążka Q jest zrównoważony przez rozłożony nacisk podłoża na tarczę. Nacisk rozłożony zastępujemy siła skupioną N Więzy mają charakter jednostronny nicidculny
30
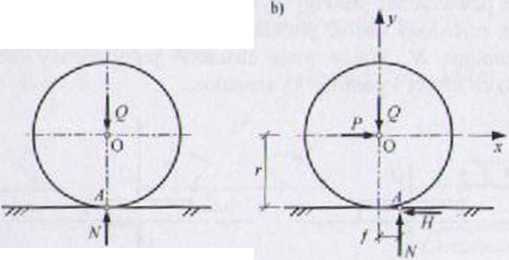
Rys. 1J7
Statyka Podstawy icorciycMW
I*i/\ próbie przetoczenia krezka za pomocą poziomej siły P pojawia się flfffiimięcic teoretycznego punktu podparcia A w kierunku działania siły P «/ !»• •chylenie reakcji podłoża o składowych //, N (rys. 1.37b). W stanie łrtniM-w.igi granicznej przesunięcie / punktu A jest największe. Wielkość / Mow.i N«e ramieniem oporu toczenia. Po przekroczeniu równowagi granicznej mt Kpiąc toczenie się krążka w kierunku działania siły P.
i H ul sił działających na krążek jest płaskim układem sił. W stanie równo-JMyi granicznej spełnione są 3RRS:
= 0: />-// = 0 =*// = P
EY = 0: N~Q =0 -t N = O (|52)
£Afo=0: Nf - Hr - 0 => P - Pp - Q l NS .inmek toczenia ma postać:
H < T = \iN (1.53)
i l i / jest silą tarcia ślizgowego. W przeciwnym przypadku nastąpi poślizg • tą/ka.
W niektórych układach Pp można wyznaczyć bezpośrednio z równania
0: Qf-Pr = 0 -»/> = />,,- <?•£ (1.54)
Sili. P t oraz reakcje H wyznaczamy indywidualnie w danej konfiguracji.
I .ii i ie cięgna o krążek
i ięgno (pas. lina) jest elementem wiotkim, przenoszącym tylko silę rozciąga-lui i W mechanice ogólnej zakłada się, że cięgno jest nieodksztalcalne (nie ulega wydłużeniu). Prostoliniowy odcinek cięgna zachowuje się jak więź elementarny i wciągany. Cięgno przełożone przez krążek (lub owinięte o krążek) przyjmuje 1 ./tali krążka. Krążek zmienia kierunek siły przenoszonej przez cięgno.
Przy próbie przesunięcia napiętego cięgna przełożonego przez nieruchomy kią/ck naciągi cięgna są różne po obu stronach krążka (rys. 1.38a). Zależność między siłami P i R ma postać
P=e“BP (1.55)
lub odwrotnie
R = t~*mP (1.56)
gdzie: p - współczynnik tarcia ślizgowego cięgna o krążek, a [rad) - kąt opasania.
W zagadnieniu odwrotnym rozpatruje się próbę obrotu krążka podpartego przegubowo względem nieruchomego i napiętego cięgna przełożonego przez
31
Statyku. Podstawy teoicty«./nc
Wyszukiwarka
Podobne podstrony:
o Jeśli nie ma możliwości komunikacji ze sklepem przez telefon tylko jedynie za pomocą e-maila to po
7 (43) 22 Podc/as pomiarów za pomocą tcrmoclemcntów n*»gą pojawić się błędy doda wc powodowane niest
o Jeśli nie ma możliwości komunikacji ze sklepem przez telefon tylko jedynie za pomocąe-maila to poj
podwiesić na uchwytach bezpośrednich, i wypoziomować za pomocą poziomnicy laserowej. Umocować przy p
oooooooo Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOOMODELOWANIE ZA POMOCĄ MES Analiza s
oooooooo Analiza statyczna konstrukcji przy użyciu MES OOOOOOOOOOMODELOWANIE ZA POMOCĄ MES Analiza s
74204 P1040039 (2) przesuwane jest ramię 4 wraz z tubusem mikroskopu 7. Ramię jest przesuw* zgrubnie
DSC04589 (4) -22.- Przy zastosowaniu utwierdzenia (połączenie za pomocą trzech prętów) pozbawia ten
DSC04589 (5) mew:*-tz~ Przy zastosowaniu utwierdzenia (połączenie za pomocą trzech prętów) pozbawia
KROK NR 10: Przy uruchomieniu programu za pomocą ikony KI otworzy się okno programu z komunikatem in
mech2 26 50 2. Określenie prędkości punktów mechanizmu i prędkości kątowych jego członów za pomocą m
mech2 26 50 2. Określenie prędkości punktów mechanizmu i prędkości kątowych jego członów za pomocą m
mechanika01 G1)Podaj słownie oraz za pomocą wzoru: Zasada Zachowania Energii Zasada Równoważności Pr
mechanika01 G1)Podaj słownie oraz za pomocą wzoru: Zasada Zachowania Energii Zasada Równoważności Pr
Wykrywanie azotanów (V) NO3’ Przy wykrywaniu azotanów (V) NOT za pomocą reakcji obrączkowej
więcej podobnych podstron