mechanika4

Moduł (wartość) wektora a wynosi
a - yo* ♦ Qy ♦ flj (12)
ponieważ wektor a jest przekątną prostopadłościanu rozpiętego na rzutach. Kosinusy kierunkowe wektora a wynoszą
«*
cos a = — a
cos2 a.
cos2a ♦ cos2a.
(1.3)
o,
cos a = — r a
cos o. ■ — a
Dowolnej osi u w przestrzeni przyporządkowany jest wcrsor e¥, którego składowe w układzie xyz możjia obliczyć na podstawie wektora geometrycznego na tej osi. o zwrocie zgodnym ze zwrotem wersora (rys. 1.2):
P = pa + Pj«, + pA
*Mm*A-*B» p,-yA-yB« p, =Za'^B
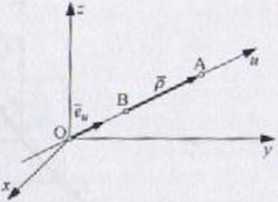
Rys. 1.2
Wówczas, zapis analityczny wersom e ma postać:
(1.5)
ee+ee+ee
>y kzz
gdzie

P = y'p* * pJ * pJ
(1.6)
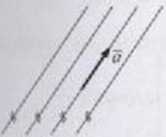
UsM./nmmy wektory swobodne, liniowe i zaczepione. Wektor swobodny JH! określony przez wartość, zwrot i kierunek. Może być on przesuwany idwooli i le (rys. I3a). Wektor liniowy jest określony przez wartość, zwrot i |mi•.11 działania (rys. I.3b). Wektor zaczepiony jest określony przez wartość, #1*1. i («• i działania i punkt zaczepienia (rys. I.3c).
■i
bi

Rys. I 3

/iniiiiui zwrotu wektora jest równoważna ze zmiana znaku:
(1.7)
b = -a = -a e - n e - a e xx y y z z
'••nu i dwóch wektorów jest określona wzorami:
(1.8)
ć = a * b - cxea+ cyty * c.e.
c,m Cj'ay + b,' ci = az+b'
Wrktoi ć jest przekątna równolegloboku rozpiętego na wektorach a, b. jeśli w .hory a. b *4 narysowane w obranej skali. rys. I.4a.

Rys. t.4
Wartość wektora r można obliczyć ze wzoru
(1.9)
ri 2 2
<* “ Vc< + cf ♦ cz
AliiWk' IVdsUiwv l.-.M. iyi/n. 9
Wyszukiwarka
Podobne podstrony:
116 Wartość średnia prądu tyrystora wynosi.i (7*7) T(AV) “-nu Xd a jego wartość
Wektory Wektor jest obiektem posiadającym moduł (długość lub wartość), kierunek oraz zwrot. Dla
1.1. Mechanika punktu materialnego POJĘCIA PODSTAWOWE Wektor położenia r = [x,y,z] Wartość wekt
Moduł I - Wartość nr 01_Wartość ✓ Zadanie 1 >/ Zadanie 2 yf Zadanie 3 >/ Zadanie 4
Mechanika04 Ruch zadany we współrzędnych prostokątnych - c.d. Wartość wektora prędkości: ■p
f3 Ładunek elementarny - ładunek pojedynczego elektronu (-e), którego wartość bezwzględna wynosie =
img156 (11) Zadanie 5. Na podstawie raportu kasowego nr 5 z dnia 20 maja 2005 r. stan kasy na koniec
page0294 986Rosenoble — Rosetti takich monet idzie na grzywnę; wartość jej wynosi rs. 6 k. 8 (40 złp
więcej podobnych podstron