Scan0042

Element prętowy na płaszczyźnie
Rozważymy pręt sprężysty o sztywności EA i długości / w lokalnym (tj. związanym z prętem) układzie współrzędnych (x’Łv’).
Ql
EA
q’2
Z poprzednich rozważań wiadomo, że
\Qu\ = ęa\ i -i
I02xj ~L“ 1 ]JW
Q' = k'u'
c
- s

W ogólnym przypadku pręt może być nachylony do osi globalnego układu (*,>')• Transformację dowolnego wektora przemieszczenia u z układu globalnego do lokalnego można zapisać:
=> u' = tu, gdzie t =
u' = ucosO + vsin# v' = vcos<9 - ?*sinć9
Element prętowy na płaszczyźnie ma 4 stopnie swobody, więc
|
Qu | |||||||
|
w |
( _ |
t 0' |
V1 |
• = Tu => u' = Tu, analogicznie • |
Q'\y |
• = T< | |
|
u'2 |
0 t |
u2 |
Qix |
Qzx | |||
|
V2. |
V2. |
02,. |
02,. |
Q' = TQ.
Równanie równowagi MES pręta płaskiego o czterech stopniach swobody, zapisane w
|
Q\x |
' 1 |
0 -1 |
0‘ |
u'\ | |
|
Q'\y |
_ EA |
0 |
0 0 |
0 | |
|
Qix |
1 |
-1 |
0 1 |
0 |
u'2 |
|
02, |
0 |
o «—■ o |
0 |
y'i. |
macierz sztywności pręta
układzie lokalnym, ma postać:
Drugi i czwarty wiersz i kolumna macierzy sztywności sązerowre. Macierz sztywności elementu o 4 stopniach swobody musi mieć
© J. Pelc
WMT/84
wymiary 4 x 4 i zawsze jest macierzą symetryczną.
Jeżeli skorzystamy z przekształceń Q' = TQ i u' = Tu, to
Q' = k'u' => TQ = k'Tu => Q = (rr'kT)i, czyli
Q = ku
k = T_1kT - macierz sztywności płaskiego elementu prętowego w układzie globalnym
—1 T
(x,y). Należy zaznaczyć, że w przypadku macierzy ortogonalnych jest T = T .
Po wykonaniu naznaczonych mnożeń macierzy otrzymamy ostateczną postać macierzy
|
sztywności: | |||||||||
|
ui |
V1 |
»2 |
v2 |
V2 | |||||
|
CS |
-c2 |
-CS |
U\ |
y |
2, | ||||
|
CS |
s2 |
-CS |
-s2 |
V1 |
V |
% | |||
|
/ |
-c2 |
-CS |
c2 |
CS |
w2 |
1 | |||
|
— CS |
-s2 |
CS |
s2 . |
v2 |
JL ś |
p-—►-1— |
—► X | ||
Przykład 1. Wyznaczanie sil w prętach kratownicy za pomocą MES.
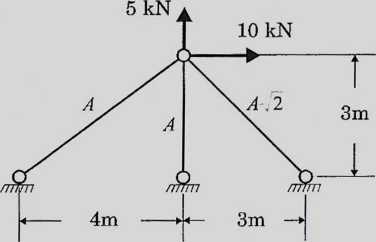
Dyskretyzacja: numeracja elementów i węzłów
Analiza elementu: budowa macierzy sztywności elementu w postaci pręta kratownicowego
Agregacja: budowa macierzy' sztywności układu (równania równowagi MES)
Wyznaczenie przemieszczeń węzłów': rozwiązanie układu równań
Wyszukiwarka
Podobne podstrony:
MGT93 RZUTOWANIE BRYŁ NA PŁASZCZYZNĘ Rozważmy wizualną rzeczywistość jakiegoś określonego przedmiot
Odwzorowanie elementów przestrzeni na płaszczyźnie. Metody rzutowania i ich wykorzystanie w praktyce
Powierzchnię elementów betonowych (na płaszczyznach poziomych i pionowych) należy impregnować bezbar
Scan0018 Elementy obsługi na kole kierownicy Funkcja niedostępna we wszystkich pojazdach. W ceiu zwi
Rozważmy pręt o powierzchni przekroju poprzecznego A(x) i długości /_. Pręt zrobiony jest z materiał
48 (205) A^ na płaszczyznę £ . W analogiczny sposób otrzymujemy kład wiarzchoł- kiC^ tj. punkty c i
Scan0001 Tablica 12-6 7 Przekroje prętów na 1,0 m szerokości płyty Odstępy Średnica prętów d,
scan0005av Zadania otwarte Zestaw XVIZestaw XVI (Geometria na płaszczyźnie kartezjańskiej) ZADANIA O
skanuj0002 2.3. PODSTAWY TEORETYCZNE 2.3.1. Teoria skręcania prętów o przekroju kołowym Jeśli pręt j
więcej podobnych podstron