Scan0068
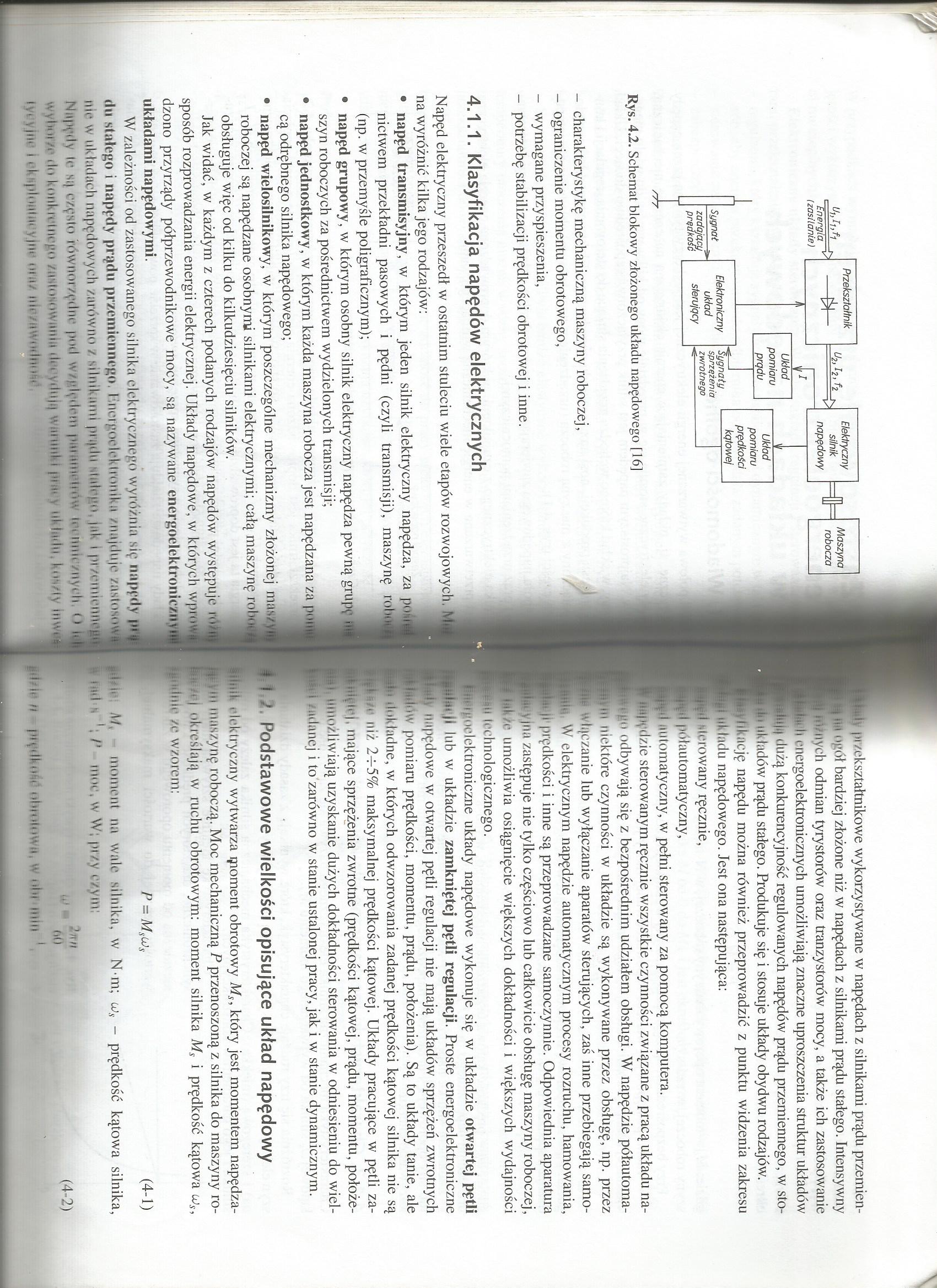
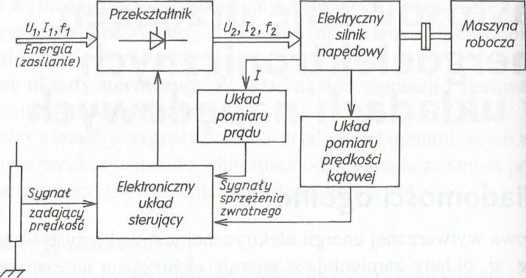
Rys. 4.2. Schemat blokowy złożonego układu napędowego f 16]
- charakterystykę mechaniczną maszyny roboczej,
- ograniczenie momentu obrotowego,
- wymagane przyspieszenia,
- potrzebę stabilizacji prędkości obrotowej i inne.
4.1.1. Klasyfikacja napędów elektrycznych
Napęd elektryczny przeszedł w ostatnim stuleciu wiele etapów rozwojowych, na wyróżnić kilka jego rodzajów:
• napęd transmisyjny, w którym jeden silnik elektryczny napędza, za pofll nictwem przekładni pasowych i pędni (czyli transmisji), maszynę rol>< (np. w przemyśle poligraficznym);
• napęd grupowy, w którym osobny silnik elektryczny napędza pewną grupę szyn roboczych za pośrednictwem wydzielonych transmisji;
• napęd jednostkowy, w którym każda maszyna robocza jest napędzana za poir cą odrębnego silnika napędowego;
• napęd wielosilnikowy, w którym poszczególne mechanizmy złożonej nnis/f roboczej są napędzane osobnymi silnikami elektrycznymi; całą maszynę robi obsługuje więc od kilku do kilkudziesięciu silników.
Jak widać, w każdym z czterech podanych rodzajów napędów występuje róf
sposób rozprowadzania energii elektrycznej. Układy napędowe, w których wpm dzono przyrządy półprzewodnikowe mocy, są nazywane energoelektronic/.nyi układami napędowymi.
W zależności od zastosowanego silnika elektrycznego wyróżnia się napędy pf dii stałego i napędy prędu przemiennego. I .neigorlcklroiiika /iwijdiijc ■ i.u>" nie w układach napędowych zarówno / almkami piądu .Utlrgo, pił i pi/ćmieniu Napędy to sij często równorzędne pod w/giędem imiaiiiotioc p i nnu . nyt li O i u \ Imi.H-ilo konkretnego/ustuMigiftnjn di i \dujti \*. artlltki pim układu ko* t\ niw
przekształtnikowe wykorzystywane w napędach z silnikami prądu przemien-| n! ogół bardziej złożone niż w napędach z silnikami prądu stałego. Intensywny Hiinych odmian tyrystorów oraz tranzystorów mocy, a także ich zastosowanie ■ii> li rnergoelektronicznych umożliwiają znaczne uproszczenia struktur układów $)uhl dużą konkurencyjność regulowanych napędów prądu przemiennego, w stoli.. iikludów prądu stałego. Produkuje się i stosuje układy obydwu rodzajów, likację napędu można również przeprowadzić z punktu widzenia zakresu Igi układu napędowego. Jest ona następująca:
Mpd Murowany ręcznie,
1^.1 półautomatyczny,
milomatyczny, w pełni sterowany za pomocą komputera.
W papędzie sterowanym ręcznie wszystkie czynności związane z pracą układu na-fpm*> odbywają się z bezpośrednim udziałem obsługi. W napędzie półautoma-M)i niektóre czynności w układzie są wykonywane przez obsługę, np. przez = włączanie lub wyłączanie aparatów sterujących, zaś inne przebiegają samo-niu W elektrycznym napędzie automatycznym procesy rozruchu, hamowania, ■■ |i prędkości i inne są przeprowadzane samoczynnie. Odpowiednia aparatura |śł‘ yjna zastępuje nie tylko częściowo lub całkowicie obsługę maszyny roboczej, |ak/r umożliwia osiągnięcie większych dokładności i większych wydajności l#3u technologicznego, fteip''elektroniczne układy napędowe wykonuje się w układzie otwartej pętli Jm p lub w układzie zamkniętej pętli regulacji. Proste energoelektroniczne I) napędowe w otwartej pętli regulacji nie mają układów sprzężeń zwrotnych ■ów pomiaru prędkości, momentu, prądu, położenia). Są to układy tanie, ale t* .Inkładne, w których odwzorowania zadanej prędkości kątowej silnika nie są j§;< niż 2-1-5% maksymalnej prędkości kątowej. Układy pracujące w pętli za-• I, mające sprzężenia zwrotne (prędkości kątowej, prądu, momentu, położe-I, umożliwiają uzyskanie dużych dokładności sterowania w odniesieniu do wiel-i udanej i to zarówno w stanie ustalonej pracy, jak i w stanie dynamicznym.
Podstawowe wielkości opisujące układ napędowy
Hiiii H.liryczny wytwarza ijioment obrotowy Ms, który jest momentem napędza-| p.> maszynę roboczą. Moc mechaniczną P przenoszoną z silnika do maszyny ro-ifh l określają w ruchu obrotowym: moment silnika Ms i prędkość kątowa cus, f#...im.- ze wzorem:
P - Ms(jjs (4-1)
fci-i. \l moment na wale silnika, w N-m; los - prędkość kątowa silnika, tml • P moc, w W; przy czym;
(4-2)
inn
no
n piędkośt' oluOloWa, u ulu nilu 1
Wyszukiwarka
Podobne podstrony:
Image 52 56 Rys. 3.18. Schemat blokowy hydrostatycznego układu napędowego 2. wykor
50. Schemat blokowy tyrystorowego układu napędowego ze sprzężeniem zwrotnym prędkościowym i
58 Artur GUZOWSKI, Andrzej SOBCZYK Rys. 4. Schemat ideowy hydrostatycznego układu napędowego pojazdu
DSC00612 (10) Rys, Schemat blokowy układu napędowego zespołu ruchu Jednostki kinematyczne) maszyny
Image147 U(t) Rys. Schemat blokowy układu opisanego równaniem stanu i równaniem wyjścia
Image148 Rys. Schemat blokowy układu gdy wektory U(t)=u(t) i Y(t)=y(t) są jednowymiarowe
Image156 Rys. Schemat blokowy układu gdy sygnały sterujące oddziały wuj ą także na sygnały wyjściowe
Image541 Rys. 4.702. Schemat blokowy sekwencyjnego układu klawiaturowego Rys. 4.703. Sekwencyjny ukł
Ui i U2 przykładane napięcia o częstotliwościach odpowiednio równych Vi i V2 Rys. Schemat blokowy uk
więcej podobnych podstron