(4)
Niepewnością i-tego pomiaru będziemy nazywać
Axpi
X
Teoria niepewności opracowana przez Gaussa pozwala na podstawienie wartości zmierzonych obliczyć pewną wartość * maksymalnie zbliżoną do wartości prawdziwej *>. Można udowodnić, że jest nią średnia arytmetyczna
n ' .
Różnicę
Ax{ = Xt -r *
nazywamy niepewnością pozorną pomiaru, czyli odchyleniem wartości uzyskanej w i-tym pomiarze od średniego wyniku.
Gauss opracowując teorię błędów założył, że chodzi wyłącznie o niepewności przypadkowe oraz, że ich rozkład jest normalny tzn.:
• niepewności małe występują w pomiarze częściej niż duże,
• niepewności o znakach ujemnych są równie częste jak błędu o znakach dodatnich.
Teoretyczny rozkład wyników pomiarów przedstawia tzw. „krzywa dzwonowa"; zwana krzywą odchyleń Gaussa (1794 r.).
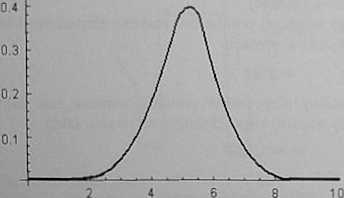
Dla dużej liczby pomiarów krzywa ta jest symetryczna.
Krzywa Gaussa jest krzywą w przyrodzie uniwersalną, taki rozkład można otrzymać analizując:
a) wzrost np. mężczyzn,
b) czas tycia muszek,
c) prędkość cząsteczek gazu itd.
Przeprowadzając serię pomiarów o tym samym stopniu dokładności jako niepewność pomiaru można przyjąć tzw. średnie odchylenie standardowe średniej, zwane także średnią niepewnością kwadratową wartości średniej. Przez średnią niepewność kwadratową rozumiemy takie odchylenie pomiaru od wartości średniej że w zakreskowanym polu rozkładu Gaussa leży 68.3 % wszystkich pomiarów.
BI
u
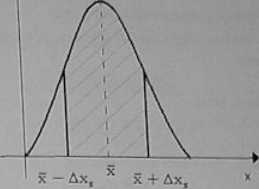
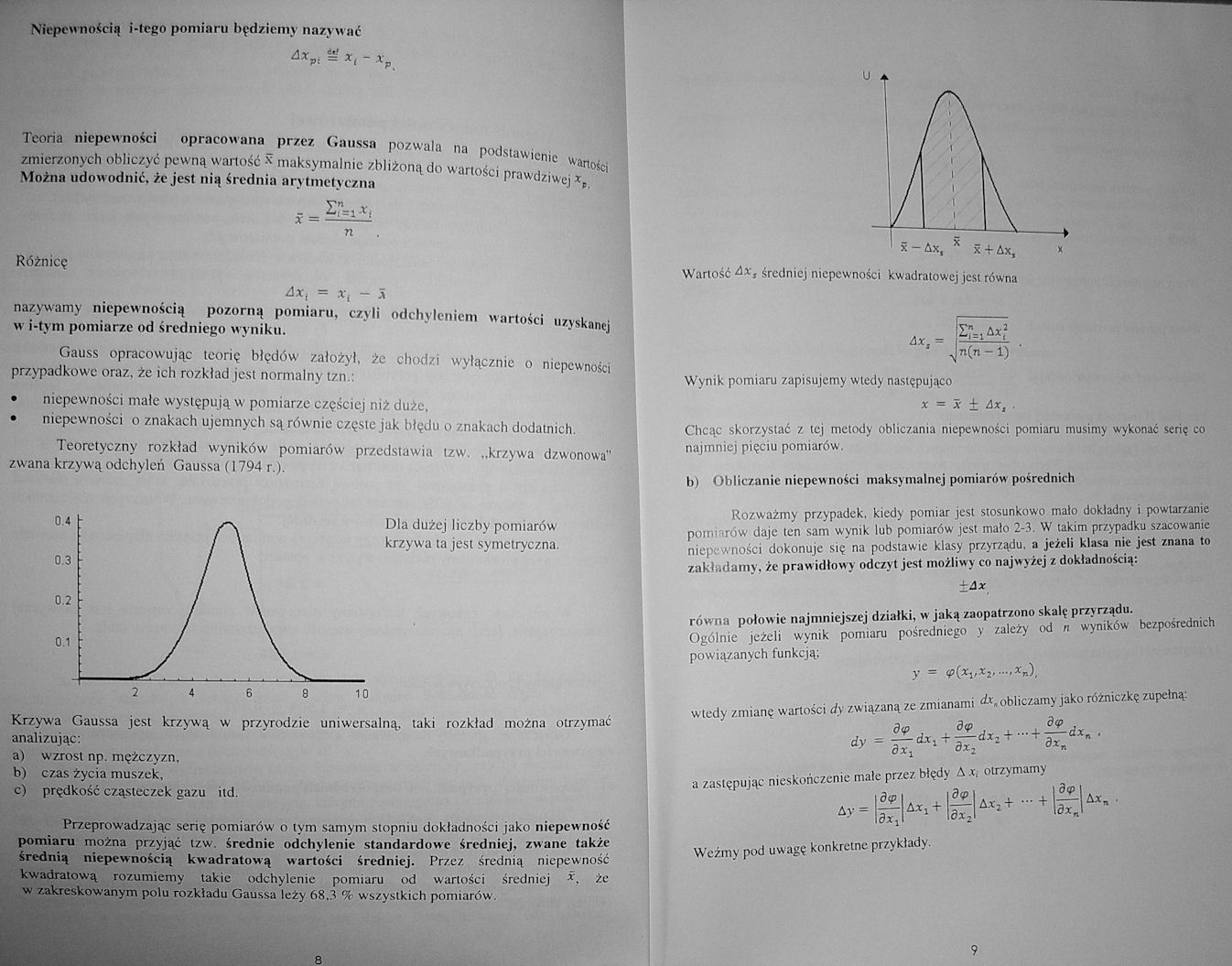
Wartość średniej niepewności kwadratowej jest równa
^n(n-
Wynik pomiaru zapisujemy wtedy następująco
x = x ± Axa .
Chcąc skorzystać z tej metody obliczania niepewności pomiaru musimy wykonać serię co najmniej pięciu pomiarów.
b) Obliczanie niepewności maksymalnej pomiarów pośrednich
Rozważmy przypadek, kiedy pomiar jest stosunkowo mało dokładny i powtarzanie pom>itrów daje ten sam wynik lub pomiarów jest mało 2-3. W takim przypadku szacowanie niepewności dokonuje się na podstawie klasy przyrządu, a jeżeli klasa nie jest znana to zakładamy, że prawidłowy odczyt jest możliwy co najwyżej z dokładnością:
równa połowie najmniejszej działki, w jaką zaopatrzono skalę przyrządu.
Ogólnie jeżeli wynik pomiaru pośredniego y zależy od n wyników bezpośrednich powiązanych funkcją;
wtedy zmianę wartości dy związaną ze zmianami obliczamy jako różniczkę zupełną:
dy = p.dxl + ^.dx2 + - + p-dxn . dxl x dxz 2 dxn *
a zastępując nieskończenie małe przez błędy A otrzymamy
\dx1
\dx
dxj
Ax,
Weźmy pod uwagę konkretne przykłady.
9
Wyszukiwarka
Podobne podstrony:
• wartość wymiaru nominalnego D — 24 mm. Wobec tego odpowiednim przyrządem pomiarowym będzie mikrome
IMG 121112 1048 haGKj mówiąc błędami przypadkowymi będziemy nazywali błędy pomiarów, które, jeżeli p
DSCF6541 38 Współczynniki tij będziemy nazywać wagami pomiarowymi i oznaczać przez Wj, a średnią: =
image00009 • „„ nie ma toalety Czosomi na wsi nie ™ Zamiast tego jest ustęp, nazywany takie wygódka.
Image457 Parametr ten będzie nazywany czasowym położeniem impulsu. Ilościowo, parametr ten wyraża si
img022 (5) kich wolność jest czymś niewiele większym od tego, co Marks nazywał „uświadomioną koniecz
page0053 R. LIV. O poznaniu aniołów 45 I z tego także powodu nazywa się aniołów rozumami i umys
Slajd46 3 Metoda simpleks W przypadku gdy jest więcej niż jedno aik > 0, wtedy numer równania r-t
Błąd prawdopodobny: Błędem prawdopodobnym pomiaru amp nazywa się taką wartość błędu, która spełnia
odcinek krzywej tj. N od 0 do 0,3 Np. Błąd pomiaru będzie można zmniejszyć poprzez zastosowanie meto
1. Moi i molowa Interpretacja przemian cHentfaKiyeft W zadaniach tego rozdziału będziecie się spotyk
więcej podobnych podstron