02
Z równania (3.11-6) wynika, że:
— siły elektromotoryczne indukowane w prętach umieszczonych w kolejnych Żłobkach są przesunięte w fazie o kąt
a =
2 P-
Żl
(3.11-7)
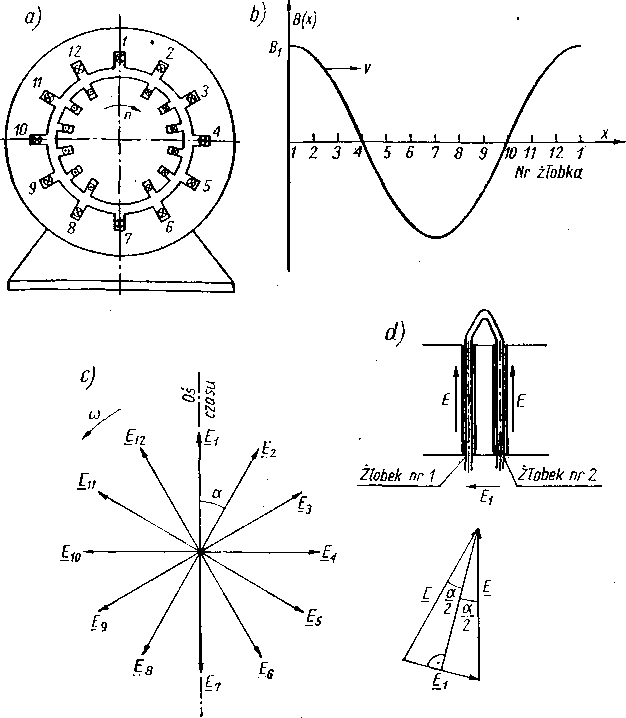
Rys. 3-10. Maszyna synchroniczna: a) szkic; b) rozkład przestrzenny indukcji magnetycznej; c) gwiazda napięć żłobkowych; d) szkic sytuacyjny i wykres wektorowy sił elektromotorycznych
zwoju ■
— amplituda siły elektromotorycznej
Prędkość obwodowa poła wirującego
jrDy n n ■ 0,8 • 3000
(3.11-8)
p =
60
60
= 125,6 m/s
162
Po podstawieniu wartości liczbowych do równania (3.L1-6) otrzymuje się
Ek(t) = 100.5 cos
£(A'— 1) - (ot
(3.11-9)
Siły elektromotoryczne indukowane w prętach w chwili t = 0 można przedstawić w postaci wykresu wektorowego podanego na rys. 3-10c. Wykres ten nosi nazwę gwiazdy napięć żłobkowych. Wartości chwilowe siły elektromotorycznej indukowanej w prętach otrzymuje się jako rzuty wektorów wirującej gwiazdy napięć żłobkowych na oś czasu.
2) Wartość skuteczna siły elektromotorycznej indukowanej w pręcie
£ =
£ml
100,5
71,2 V
Z rysunku 3-1 Od wynika, że siła elektromotoryczna zwoju utworzonego z prętów umieszczonych w sąsiednich żłobkach, np. w żłobkach 1 i 2
£, = 2Esin — = 2-71,2 sin = 36,7 V
Siła elektromotoryczna zwoju El jest mała, mniejsza nawet od siły elektromotorycznej E pojedynczego pręta. Tworzenie zwojów z prętów znajdujących się w sąsiednich żłobkach jest więc niekorzystne.
Przy poskoku yk zwój tworzą pręty umieszczone w żłobkach o numerach k i (k+y\)- Z gwiazdy napięć żłobkowych (rys. 3-I0c) wynika, że kąt zawarty między siłami elektromotorycznymi indukowanymi w prętach
ar = 7'l« (3.11-10)
Podziałka biegunowa maszyny wyrażona w żłobkach

(3.11-11)
Wprowadzając zależności (3.11-7) i (3.11-11) do (3.11-10) otrzymuje się
■ = (3,11-12)
Silą elektromotoryczna zwoju
£i = 2£sin \■= 2E sin ^) (3.11-13)
Podziałka biegunowa* zgodnie z zależnością (3.11-11), wyrażona w żłobkach
Zwój o poskoku y, = 6 żłobków jest więc zwojem średnicowym i indukowana siła elektromotoryczna
£,, = 2£ = 2 • 71,2 = 142,4 V
n*
163
Wyszukiwarka
Podobne podstrony:
Z równania (3.11-6) wynika, że: — siły elektromotoryczne indukowane w prętach umieszczonych w kolejn
Z równania (3.11-6) wynika, że: — siły elektromotoryczne indukowane w prętach umieszczonych w kolejn
/miana entalpii swobodnej AGW:AG. « -z - F A£ (8.11) Z równania (8.11) wynika, że
Z równań Maxwella wynika, że istnieją fale elektromagnetyczne o prędkości światła. Tę sensację
425 [1024x768] 434 ELEKTROCHEMIA Z równania (5.195) wynika, że (5.200) ae _ a0- k —i a0 aQk gdzie k
Z równań Maxwella wynika, że istnieją fale elektromagnetyczne o prędkości światła. Tę sensację
slajd13 b Z równania tego wynika, że przesunięcie fazowe dwóch przebiegów htfrtilH .cznych o różnej
img039 (6) 129 - Ze wzoru (11) wynika, że straty mocy czynnej są odwrotnie proporcjonalne do kwadrat
slajd13 b Z równania tego wynika, że przesunięcie fazowe dwóch przebiegów htfrtilH .cznych o różnej
img039 (6) 129 - Ze wzoru (11) wynika, że straty mocy czynnej są odwrotnie proporcjonalne do kwadrat
Podstawy chemii, ćwiczenia laboratoryjne 3 Wydzielony jod reaguje z ^2826)3 : 3 12 + 6 S2O3 —> 6
Obraz 2 (14) Z równania tego wynika, że ekstremum wystąpi dla x2 = 7//2. Uwzględniając tę wartość w
176 PRZEMYSŁ CHEMICZNY 23 (1939; przy porównaniu z równaniem Staudingerał,l: wynika, że VQ jest
IMGA02 Naprężenia w belce zginanej Z równania powyższego wynika, że dla danego przekroju naprężenia
P1120606 [1024x768] 193 A = a Aof A«-(-<+£Ao)^a>cJ(»•) Z równania tego wynika, źe stopień dyso
Z równania równowagi wynika, że oś obojętna dzieli przekrój tak, że momenty statyczne części przekro
siecii Z równania (2.152) wynika, że pomimo zwiększenia szerokości kanału do nieskończoności, przepu
siecii Z równania (2.152) wynika, że pomimo zwiększenia szerokości kanału do nieskończoności, przepu
więcej podobnych podstron