08
= 2
Liczba żłobków na biegun i fazę
24
2-3-2
źr
q 2 mp
Podziałka biegunowa wyrażona w żłobkach
6
Z i 24
T “ 2jP " T
Poskok
5
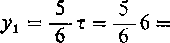
Na rysunku 3-15a podano przynależność żłobków stojana do poszczególnydt faz, przy uwzględnieniu liczby żłobków na biegun i fazę i przesunięcia kolejnych faz o kąt elektryczny 2/3 tt.
W uzwojeriiu trójpiętrowym połączenia czołowe poszczególnych faz rozmieszczone są w trzech płaszczyznach. Z tego powodu zezwoje faz różnią się wymiarami, przy czyni poskok jest jednakowy. Przy poskoku y, = 5 uzwojenie np. fazy A tworzą zezwoje, których boki umieszczone są w żłobkach 2 — 7, 8 — 13, 14 — 19, 20 — 1. Schemat uzwojenia przedstawiono na rys. 3-15b.
2) Kąt zawarty między wektorami gwiazdy napięć żłobkowych dla dowolnej harmonicznej
a zatem
— dla 3. harmonicznej
a3 = 3
2 • 2tt
24
Tt
2
— dla 5. harmonicznej
'2-2tc 5
■•■5TT' 7"
Gwiazdę napięć żłobkowych z podaniem numeracji żłobków 3. harmonicznej pokazano na rys. 3-16a. natomiast 5. harmonicznej na rys. 3-16c.
Przy sporządzaniu wykresów wektorowych sił elektromotorycznych fazowych 3. i 5. harmonicznej korzysta się z gwiazdy napięć żłobkowych i ze schematu uzwojenia (rys. 3-15b). Wykresy wektorowe sił elektromotorycznych fazowych uzyskuje się sumując siły elektromotoryczne indukowane w bokach zezwojów przynależnych do poszczególnych faz, w kolejności zgodnej ze schematem uzwojenia.
Wykresy sił elektromotorycznych fazowych 3. i 5. harmonicznej — przy założeniu, że w punkcie zerowym połączono końce faz X, Y, Z — przedstawiono na rys. 3-16b i 3-16d.
Rys. 3-16. Gwiazdy napięć żłobkowych i wykresy sił elektromotorycznych fazowych: a), b)dla 3. harmonicznej; c), d) dla 5. harmonicznej
Z rys. 3-16b i 3-16d wynika, że:
— siły elektromotoryczne fazowe 3. harmonicznej dla poszczególnych faz są że sobą w fazie;
— siły elektromotoryczne fazowe 5. harmonicznej stanowią układ przeciwnej kolejności faz w porównaniu z siłami elektromotorycznymi fazowymi 1. harmonicznej.
Sporządzenie wykresu wektorowego sił elektromotorycznych fazowych 1. harmonicznej pozostawia się dó samodzielnego rozwiązania.
Zadanie 3.17. Maszyna indukcyjna ma dane: liczba faz m — 3, liczba par biegunów p — 2, liczba żłobków stojana Żx = 30.
Należy 'wykreślić gwiazdę napięć żłobkowych i sporządzić schemat uzwojenia jednowarstwowego dwupiętrowego.
Rozwiązanie
Kąt zawarty między wektorami gwiazdy napięć żłobkowych
2pi 2'2it 2tt
a=-IT=~lćr=T5-
Gwiazdę napięć żłobkowych z podaniem numeracji żłobków przedstawiono na rys. 3-17a.
175
Wyszukiwarka
Podobne podstrony:
Podziałka biegunowa wyrażona w żłobkach Żj_ 30 Ip X 2-2 = 7,5 Liczba żłobków na biegun i fazę q
69 Projektowanie i analiza uzwojeń ułamkowych maszyn .Q, = 30 , p = 4 , m = 3 . Liczba żłobków na bi
360 (15) 360 uzwojenia fazowego jest równa $(3/1-2), przy czym q — liczba żłobków m biegun i fazę. T
skanuj0037 (24) 7.5. Charakterystyka współczesnego ruchu turystycznego na świecie 187 samym czasie l
M. M. Kupczyk kadencji ich liczba wzrosła do 39 (w tym 24 profesorów i doktorów habilitowanych). Na
Image259 tym wykorzystano fakt, że liczba impulsów na wyjściu licznika programowanego w cyklu zlicza
Image342 Wejścia informacyjnel:stV {Nieparzyst. > Ł Parzyst Wejścia Wyjścia Liczba stanów H na
Zdjęcie0611 WNIOSKI Kownorwagowa liczba gatunków na wyspie wynika / wygaszania (ekstynkcji) gat
łuki0029 Konstrukcja łuków 291; Na rysunku 13-24 pokazano przykładowo zbrojenie łuku o rozpiętości 2
skanuj0133 (13) Na podstawie wzoru 6.24 wyznacza się siłę osiową Qa, działającą na jedną
więcej podobnych podstron