out 0076
32
rycznych wykorzystujących dane uzyskiwane z prostych testów szeregowego układu regulator - obiekt bądź sam obiekt, takich jak test drgań lub odpowiedź na skok jednostkowy.
Na podstawie testu drgań Zieglcr i Nichols zaproponowali następujący sposób doboru nastaw regulatorów P, PI, PID:
- w układzie zamkniętym regulacji nastawić regulator na działanie jedynie proporcjonalne (człony I i D wyłączone) i zwiększając wartość kp doprowadzić do zerowego zapasu stabilności układu objawiającego się nietlumionymi (i nie narastającymi) drganiami na wyjściu,
- zmierzyć okres tych drgań oraz współczynnik kp^, przy którym drgania tc wystąpiły,
- w zależności od typu regulatora przyjąć następujące wartości nastaw: p kp=0.5 kp^;
PI kp=0.45k^; Tj-O.SST^;
PID kp=0.6kpgr; Tjs=0.5 ; Td =0.121^;
Jest oczywiste, żc zasada Zieglcra-Nicholsa nie zapewnia zbyt dużej dokładności doboru nastaw regulatora, bowiem ocena właściwości obiektu sprowadzana jest do dwóch tylko wskaźników: i k^
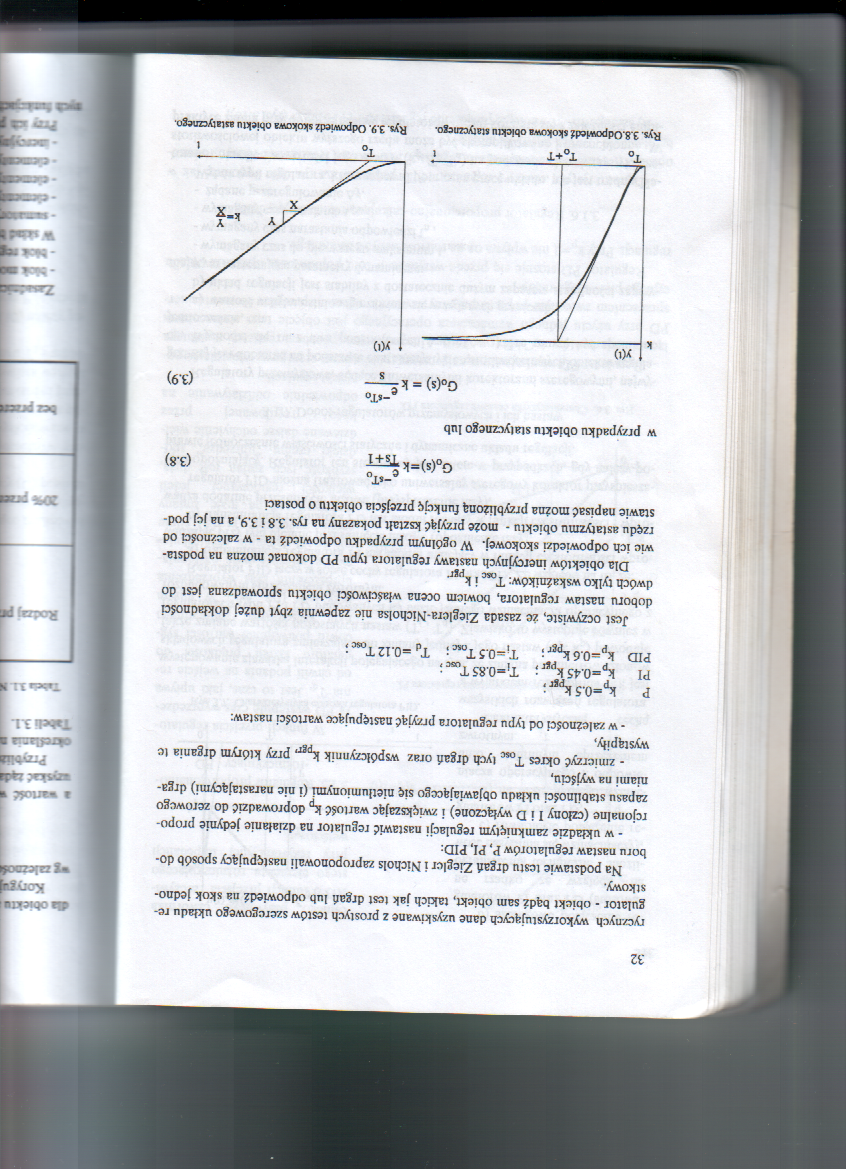
Dla obiektów inercyjnych nastawy regulatora typu PD dokonać można na podstawie ich odpowiedzi skokowej. W ogólnym przypadku odpowiedź ta - w zależności od rzędu astatyzmu obiektu - może przyjąć kształt pokazany na rys. 3.8 i 3.9, a na jej podstawie napisać można przybliżoną funkcję przejścia obiektu o postaci

(3.8)
w przypadku obiektu statycznego lub
(3.9)
Go(s) = k^
-‘To
k
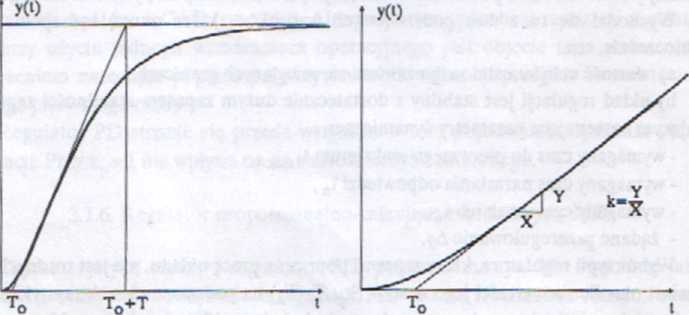
Rys. 3.8.0dpowłedź skokowa obiektu statycznego. Rys. 3.9. Odpowiedź skokowa obiektu asiatyanegn.
Wyszukiwarka
Podobne podstrony:
Strona 3 Do wykonania zadania wykorzystaj: Dane techniczne i schemat ideowy programowalnego cyfrowo
Strona 3 (11) Do wykonania zadania wykorzystaj: Dane techniczne i schemat ideowy programowalnego cyf
Strona 3 (11) Do wykonania zadania wykorzystaj: Dane techniczne i schemat ideowy programowalnego cyf
skanuj0012 (330) 32 ru wykorzystywaną w amerykańskiej tradycji literackiej przez Czarnych autorów au
29 5. Wykorzystując dane z arkuszy zaprojektowanych w poprzednich ćwiczeniach zbuduj poniższą tabelę
skanuj0065 IV. ZADANIA DO ETAPU PRAKTYCZNEGO EGZAMINU DLA ZAWODU TECHNIK EKONOMISTADo wykonania zada
s 127 127 uzyskanej jako średnia z pomiarów. Chcąc wykorzystać dane z pomiaru przewodnictwa, zamiast
2.3. Opisywanie kształtu Ziemi 15 2.2.1. Wykorzystanie Dane przestrzenne są zbiera
I Ekonomia a psychologia□ podstawowe różnice (Warneryd, 2004)wykorzystywane dane: EKON: obiektywne,
Ciąg arytmetyczny 1 a4 = a[ + (4 - l)r = a, + 3r «10 = «i + (10- = + 9 r Wykorzystując dane a4 =
techniką wysokosprawnej chromatografii cieczowej trwała 25 minut. Dane uzyskiwane dla analizowanych
Technik ekonomista 341 [02] Do wykonania zadania wykorzystaj: Dane identyfikacyjne hurtowni „Elektra
zad03 17. Wykorzystując dane dotyczące wielkości obrotów na Warszawskiej Giełdzie Papierów Wartościo
więcej podobnych podstron