Image 006
W5-6
fe»
i
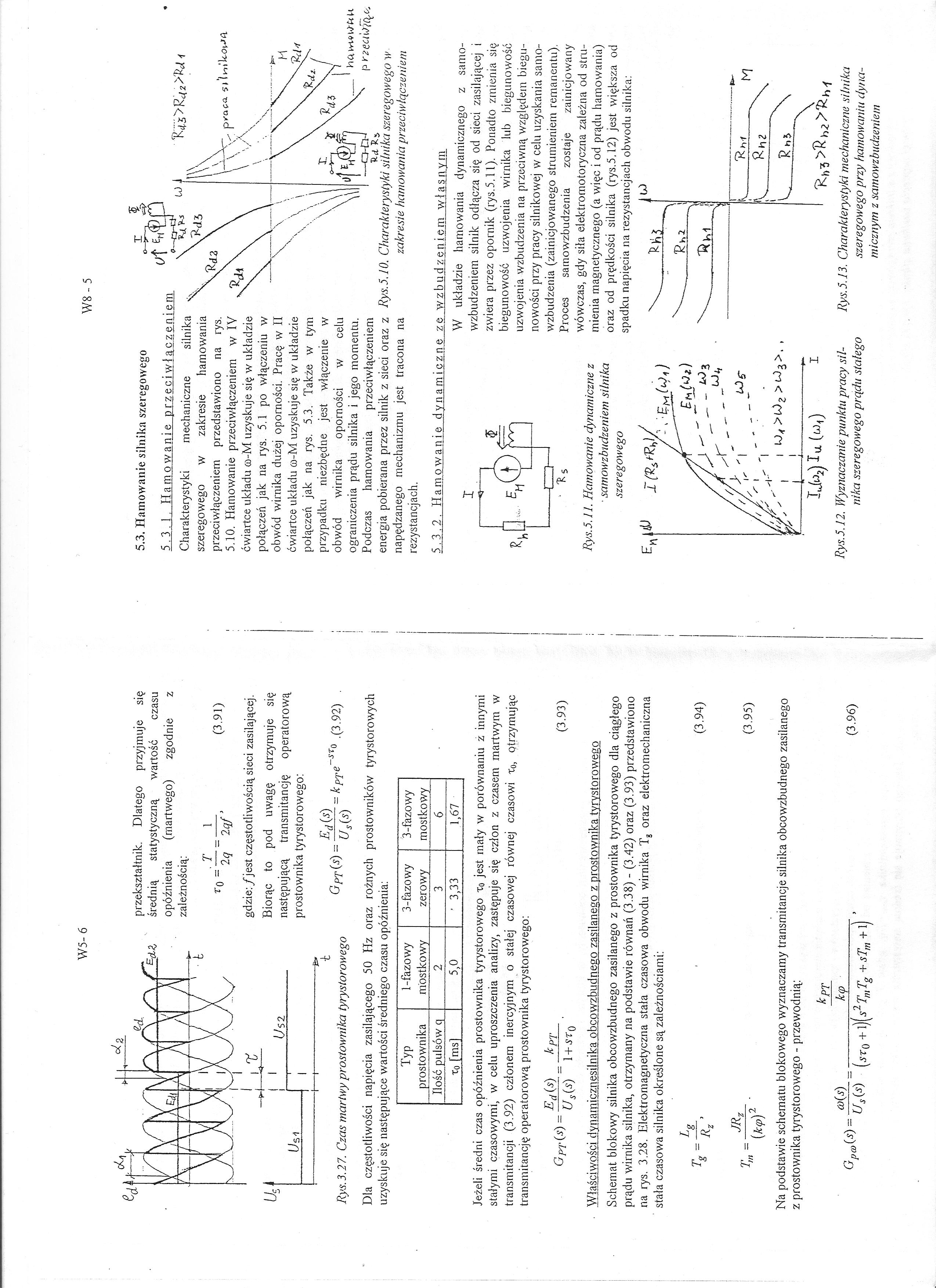
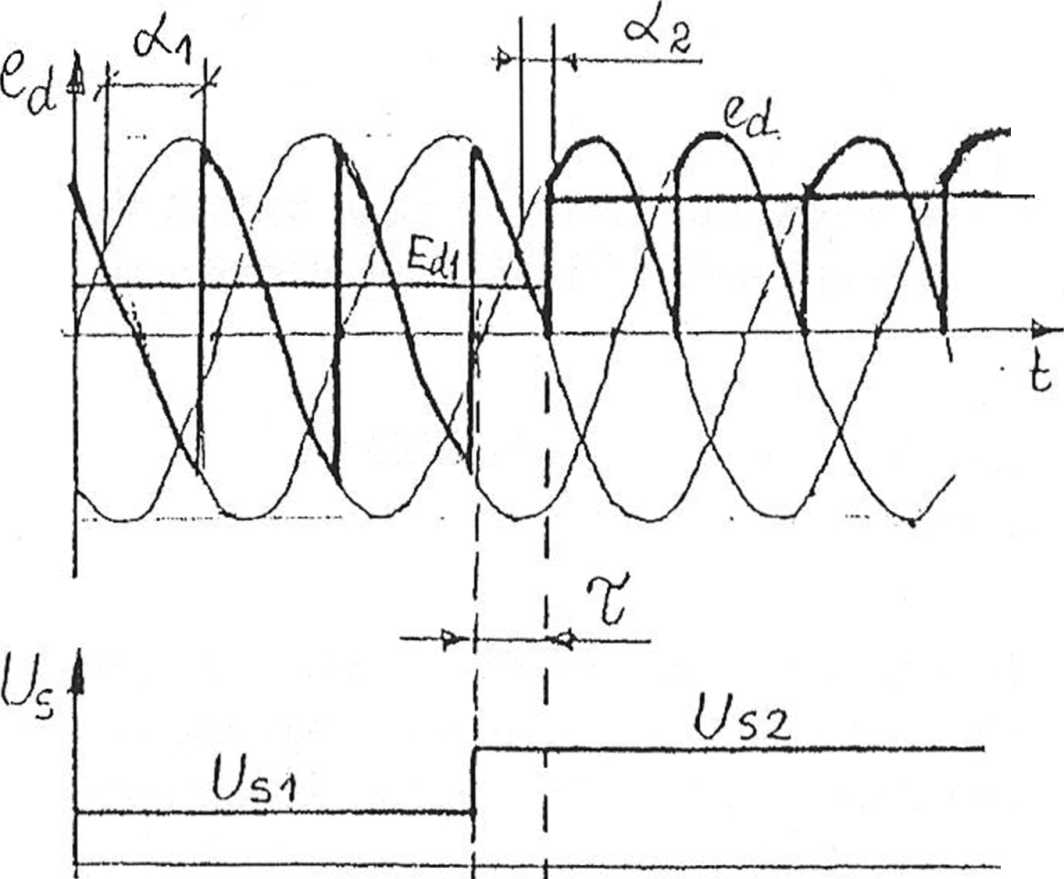
Rys. 3.27. Czas martwy prostownika tyrystorowego
przekształtnik. Dlatego przyjmuje się średnią statystyczną wartość czasu opóźnienia (martwego) zgodnie z zależnością:
(3.91)
T 1

2 q 2 qf J
gdzie:/jest częstotliwością sieci zasilającej.
Biorąc to pod uwagę otrzymuje się następującą transmitancję operatorową prostownika tyrystorowego:

Dla częstotliwości napięcia zasilającego 50 Hz oraz rożnych prostowników tyrystorowych uzyskuje się następujące wartości średniego czasu opóźnienia:
|
Typ prostownika |
1-fazowy mostkowy |
3-fazo wy zerowy |
3-fazowy mostkowy |
|
Ilość pulsów q |
2 |
3 |
6 |
|
to fmsl |
5.0 |
• 3,33 |
1.67 |
Jeżeli średni czas opóźnienia prostownika tyrystorowego To jest mały w porównaniu z innymi stałymi czasowymi, w celu uproszczenia analizy, zastępuje się człon z czasem martwym w transmitancji (3.92) członem inercyjnym o stałej czasowej równej czasowi to, otrzymując transmitancję operatorową prostownika tyrystorowego:
(3.93)
Właściwości dynamicznesilnika obcowzbudnego zasilanego z prostownika tyrystorowego
Schemat blokowy silnika obcowzbudnego zasilanego z prostownika tyrystorowego dla ciągłego prądu wirnika silnika, otrzymany na podstawie równań (3.38) - (3.42) oraz (3.93) przedstawiono na rys. 3.28. Elektromagnetyczna stała czasowa obwodu wirnika Tg oraz elektromechaniczna stała czasowa silnika określone są zależnościami:
|
rp TS~ R ’ |
(3.94) |
|
9 su II u |
(3.95) |
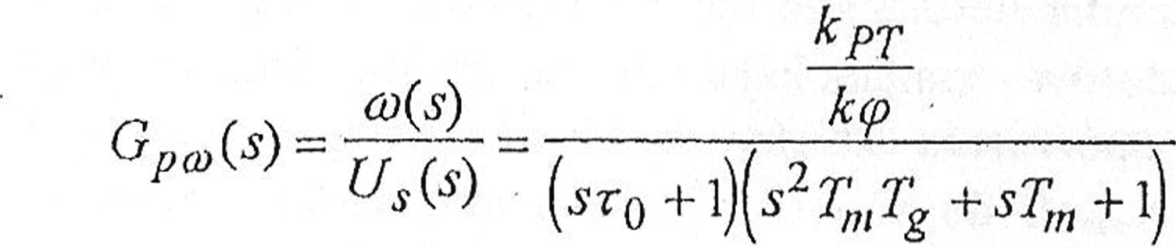
Na podstawie schematu blokowego wyznaczamy transmitancję silnika obcowzbudnego zasilanego z prostownika tyrystorowego - przewodnią:
)
(3.96)
W8 - 5
S
5.3. Hamowanie silnika szeregowego
5.3.1. Hamowanie przeciw!aczeniem
Charakterystyki mechaniczne silnika szeregowego w zakresie hamowania przeciwłączeniem przedstawiono na rys.
5.10. Hamowanie przeciwłączeniem w IV ćwiartce układu co-M uzyskuje się w układzie połączeń jak na rys. 5,1 po włączeniu w obwód wirnika dużej oporności. Pracę w II ćwiartce układu co-M uzyskuje się w układzie połączeń jak na rys. 5.3. Także w tym przypadku niezbędne jest włączenie w obwód wirnika oporności w celu ograniczenia prądu silnika i jego momentu.
Podczas hamowania przeciwłączeniem energia pobierana przez silnik z sieci oraz z napędzanego mechanizmu jest tracona na rezystancjach.
5.3.2, Hamowanie dynamiczne ze wzbudzeniem własnym
u i
c—
\

w
p/aęa 5 > I » It-OyJCl
\ A
H
—O-CH
Rys. 5,10. Charakterystyki silnika szeregowego w
zakresie hamowania przeciwłączeniem
Rys. 5.11. Hamowanie dynamiczne z • samów z budzeniem silnika szeregowego
l tO^ 5*10^ 5* .
I
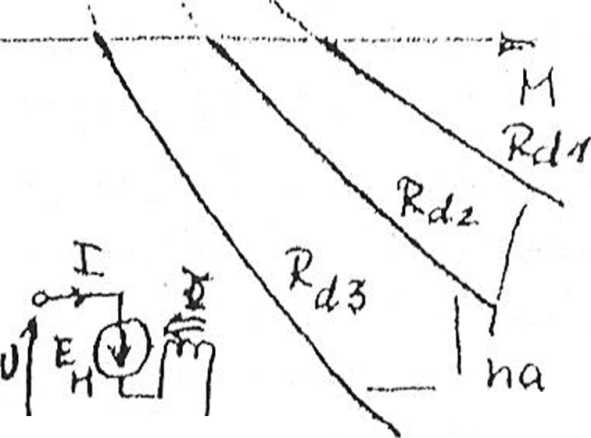
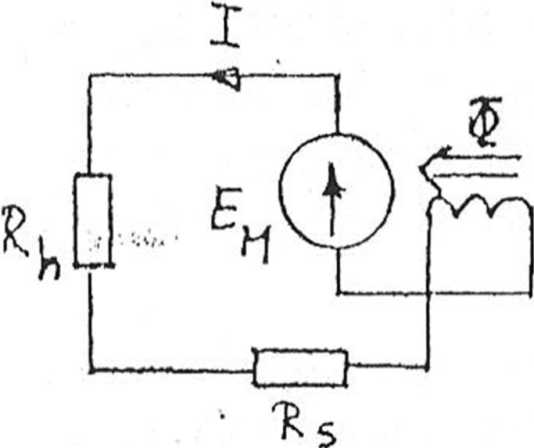
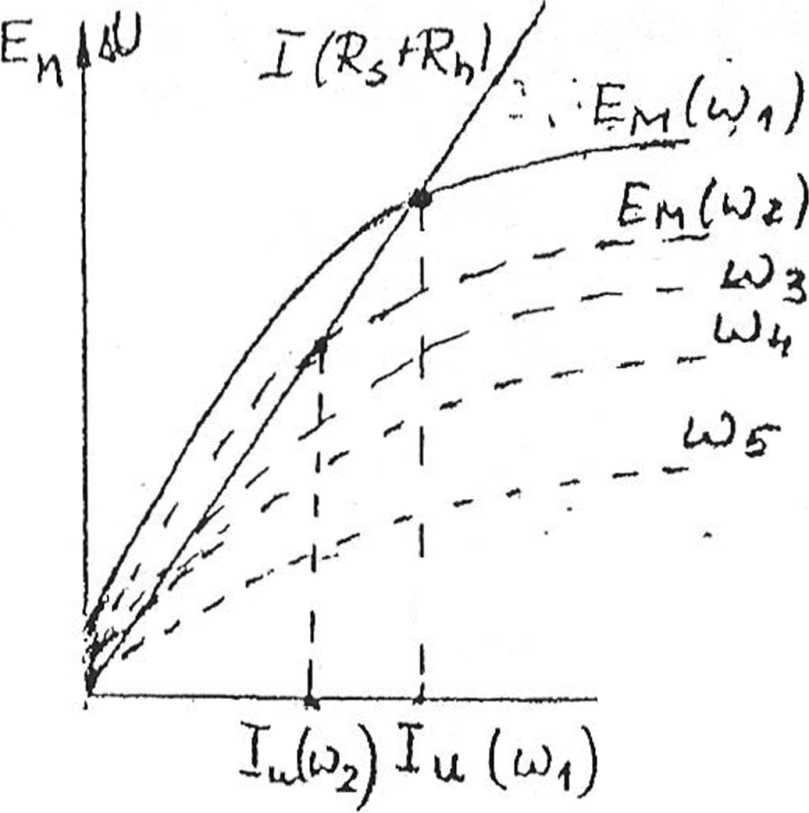
W układzie hamowania dynamicznego z samo-wzbudzeniem silnik odłącza się od sieci zasilającej i zwiera przez opornik (rys.5.11). Ponadto zmienia się biegunowość uzwojenia wirnika lub biegunowość uzwojenia wzbudzenia na przeciwną względem biegunowości przy pracy silnikowej w celu uzyskania samo-wzbudzenia (zainicjowanego strumieniem remanentu). Proces sarnowzbudzenia zostaje zainicjowany wówczas, gdy siła elektromotoryczna zależna od stł umienia magnetycznego (a więc i od prądu hamowania) oraz od prędkości silnika (rys.5,12) jest większa od spadku napięcia na rezystancjach obwodu silnika:
jU>
H *
Rys. 5.12. Wyznaczanie punktu pracy silnika szeregowego prądu stałego
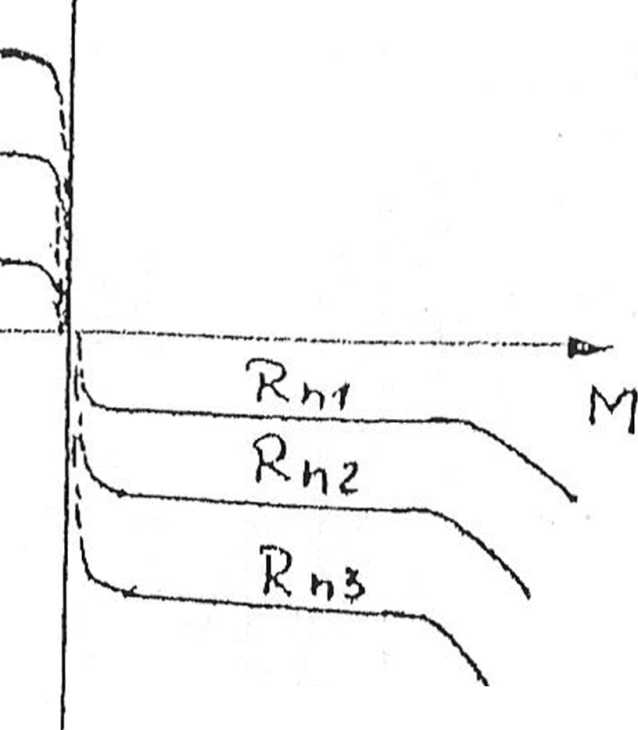
Rys. 5.13. Charakterystyki mechaniczne silnika
szeregowego przy hamowaniu dynamicznym z sam
Wyszukiwarka
Podobne podstrony:
8.1. WPROWADZENIE 379 Rys. 8.1. Falownik prądu zasilany z prostownika tyrystorowego: a) układ; b) pr
Image 66 70 Rys. 3.27. Przykłady rozwiązań konstrukcyjnych robotów przemysłowych z napędem elektrycz
Rys. 27 Rozkład ciśnienia wokół kasku do jazdy na czas 3.4 Wnioski. Po przeprowadzeniu analizy, przy
X ti — czas propagacji bramki EX NOR t2 — suma czasów propagacji inwerterów Rys. 8.27. Przebiegi
Image 002 W5-2 Równanie napięć obwodu prądu wyprostowanego układu z rys. 3.21 w stanie ustalonym dla
Image 015 W7 - 4 Dla spotykanych w praktyce częstotliwości f) rzędu kilku kHz, czas martwy przekszta
image 006 Spis treści 3 Określenie pola w strefie dalekiej przy wykorzystaniu pote
Image119 czasu propagacji sygnału do stanu 0 na wyjściu od temperatury dla przerzutni-ka D przedstaw
Image425 kowo włączyć do układu diodę krzemową (rys. 4.504). Czas trwania impulsu wyjściowego T nale
skanuj0104 (23) 188 B. Cieślar Rys. 4.27.1 IV. Zginanie
SNC03683 zaburzenie równowag Rys. 7.27. Fazy rozwoju niżu rozwijającego się na froncie, (a) powstaje
więcej podobnych podstron