Image 007
_ 9 _
Ilość stopni rozruchowych m można wyznaczyć z zależności
_ 9 _
m =
ln
Mn
maxsN
ln
r rnax;
Mr
min
(6.34)
lub
ln
/
2N
m -
b2 ma
ln
2 max
(6.35)
/
2 min
Wartość rezystancji dodatkowej na k-tym stopniu rozruchowym jest równa:
r
Rac - &
r m;L\
V b/lr min 2
-1
(6.36)
Wartość rezystancji uzwojeń wirnika można wyznaczyć z równania mocy dla obwodu wirnika w znamionowym punkcie pracy silnika: '
Sff 2
PeN ~ PysNSN = MNcossN = My(DN = 3^2NRr >
sN
(6.37)
z którego obliczamy:
=-2 3/2
(6.38)
2/VU”^yV
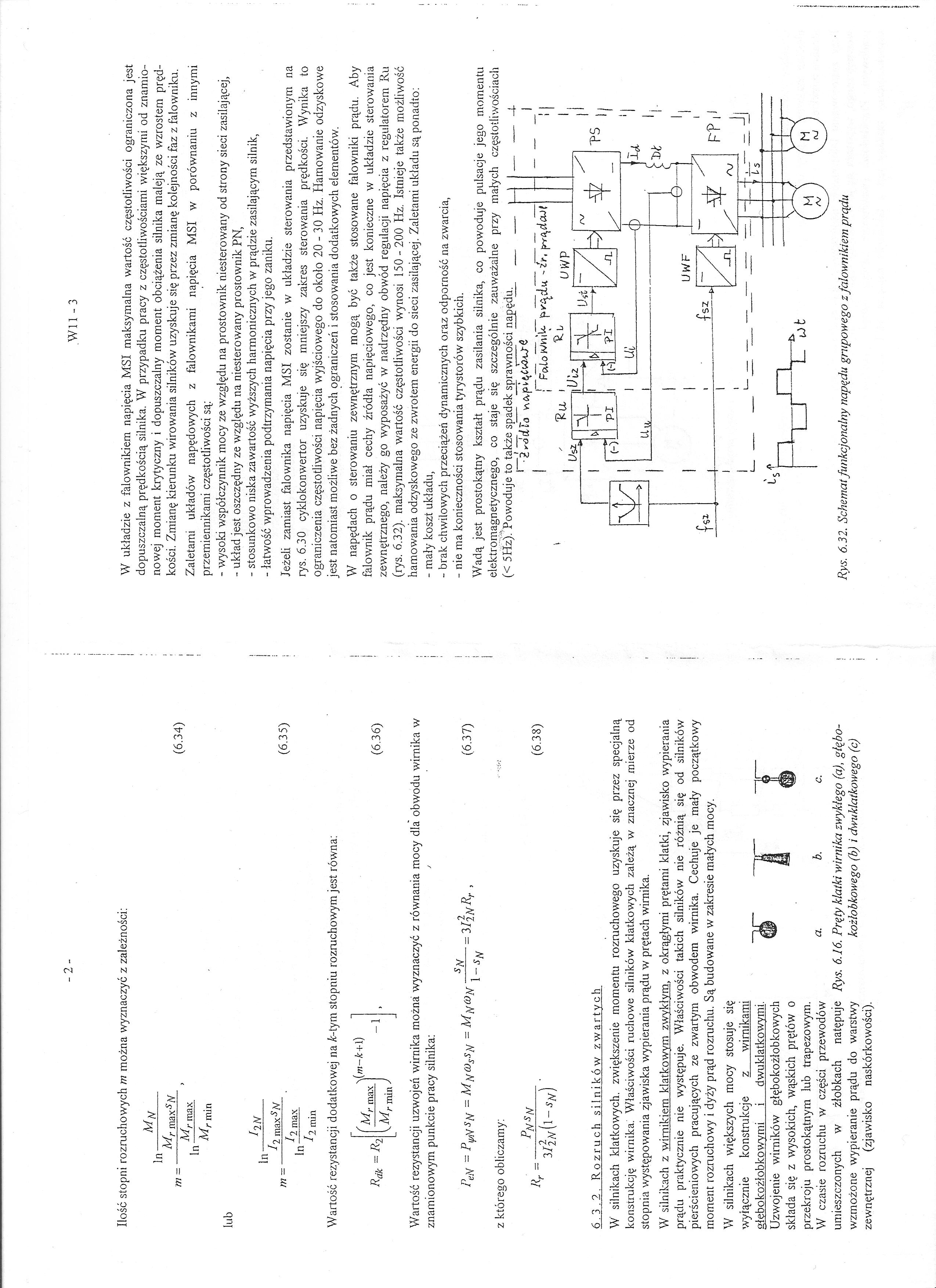
6,3.2, Rozruch silników zwartych
W silnikach klatkowych, zwiększenie momentu rozruchowego uzyskuje się przez specjalną konstrukcję wirnika. Właściwości ruchowe silników klatkowych zależą w znacznej mierze od stopnia występowania zjawiska wypierania prądu w prętach wirnika.
W silnikach z wirnikiem klatkowym zwykłym, z okrągłymi prętami klatki, zjawisko wypierania prądu praktycznie nie występuje. Właściwości takich silników nie różnią się od silników pierścieniowych pracujących ze zwartym obwodem wirnika. Cechuje je mały początkowy moment rozruchów)' i dyży prąd rozruchu. Są budowane w zakresie małych mocy.

a. b. c.
Rys. 6.16. Pręty klatki wirnika zwykłego (a), głębo-
kożłobkowego (b) i dwuklatkowego (c)
W silnikach większych mocy stosuje się wyłącznie konstrukcje z wirnikami głebokożłobkowymi i dwu klatkowym i. Uzwojenie wirników głębokożłobkowych składa się z wysokich, wąskich prętów o przekroju prostokątnym łub trapezowym. W czasie rozruchu w części przewodów umieszczonych w żłobkach natępuje wzmożone wypieranie prądu do warstwy zewnętrznej (zjawisko naskórkowości).
Wll -3
W układzie z falownikiem napięcia MSI maksymalna wartość częstotliwości ograniczona jest dopuszczalną prędkością silnika. W przypadku pracy z częstotliwościami większymi od znamionowej moment krytyczny i dopuszczalny moment obciążenia silnika maleją ze wzrostem prędkości. Zmianę kierunku wirowania silników uzyskuje się przez zmianę kolejności faz z falowniku.
Zaletami układów napędowych z falownikami napięcia MSI w porównaniu z innymi przemiennikami częstotliwości są:
- wysoki współczynnik mocy ze względu na prostownik niesterowany od strony sieci zasilającej,
- układ jest oszczędny ze względu na niesterowany prostownik PN,
- stosunkowo niska zawartość wyższych harmonicznych w prądzie zasilającym silnik,
- łatwość wprowadzenia podtrzymania napięcia przy jego zaniku.
Jeżeli zamiast falownika napięcia MSI zostanie w układzie sterowania przedstawionym na
rys. 6.30 cyklokonwertor uzyskuje się mniejszy zakres sterowania prędkości. Wynika to
ograniczenia częstotliwości napięcia wyjściowego do około 20 - 30 Hz. Hamowanie odzyskowe
jest natomiast możliwe bez żadnych ograniczeń i stosowania dodatkowych elementów.
%
W napędach o sterowaniu zewnętrznym mogą być także stosowane falowniki prądu. Aby falownik prądu miał cechy źródła napięciowego, co jest konieczne w układzie sterowania zewnętrznego, należy go wyposażyć w nadrzędny obwód regulacji napięcia z regulatorem Ru (rys. 6.32). maksymalna wartość częstotliwości wynosi 150-200 Piz. Istnieje także możliwość hamowania odzyskowego ze zwrotem energii do sieci zasilającej. Zaletami układu są ponadto:
- mały koszt układu,
- brak chwilowych przeciążeń dynamicznych oraz odporność na zwarcia,
- nie ma konieczności stosowania tyrystorów szybkich.
Wadą jest prostokątny kształt prądu zasilania silnika, co powoduje pulsacje jego momentu elektromagnetycznego, co staje się szczególnie zauważalne przy małych częstotliwościach
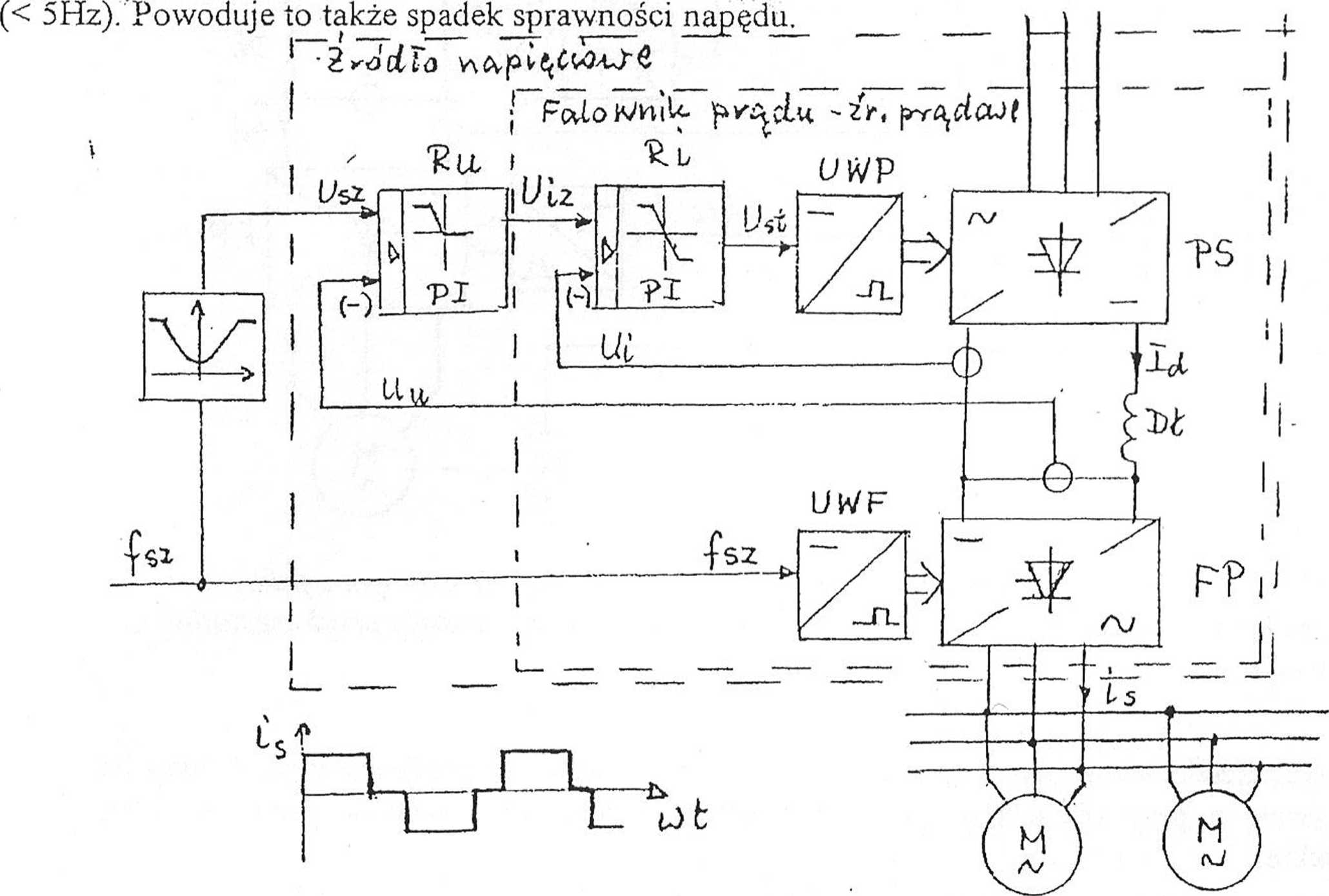
Rys. 6.32. Schemat funkcjonalny napędu grupowego z falownikiem prądu
Wyszukiwarka
Podobne podstrony:
skrypt174 181 Wartość maksymalną pola magnetycznego można wyznaczyć z zależności: 181 H hi llj L 1,1
6 (536) WSPÓŁRZĘDNE SFERYCZNE. Z rysunku larwo można wyznaczyć zależności między współrzędnymi
Фото4864 Szczytowe ciśnie prędkości qp na wysokości z można j wyznaczyć z zależności:qPfr) - gdzie:
DSC01015 Flat .60) rzeczywistym można wyznaczyć z zależności P = aCU2tgS (ZÓ2) Kondensator rzeczywi
DSC01015 (3) rzeczywistym można wyznaczyć z zależno&cr P = aCU* tg$ (2.62) Kon
geodezja�0 Zależnie od potrzebnej dokładności oraz rodzaju posiadanych danych, powierz-hnię można wy
75619 Image (11) Odbiór i odbiorca w procesie historycznoliterackim 77 zależnie od tego, w jakim sto
XV 19.2.3. Wyznaczenie zależności zmiany stopnia polaryzacji liniowej światła po
Współ czynnik podatności C można wyznaczyć z empirycznych zależności: a) dla stóp kwadratowych lub
9 (1256) 28 Laboratorium materiałoznawstwa Masą atomu można wyznaczyć z następującej zależności (pos
PARAMETRY OPISUJĄCE MANIPULATORY ROBOTÓW Dla przedstawionego manipulatora można wyznaczyć liczbę sto
Image (11) Odbiór i odbiorca w procesie historycznoliterackim 77 zależnie od tego, w jakim stopniu k
Photo0008 Wartość średniej wydajności można wyznaczyć analitycznie z zależności [2.12] Sn
469 2 12.1. ZASADY PRZETWARZANIA ENERGII WODY można wyznaczyć teoretyczną ilość energii A [J] zawart
• Wyznaczana wartość jest przybliżona; zależność można wyznaczać dla
więcej podobnych podstron