skanuj0031 (75)
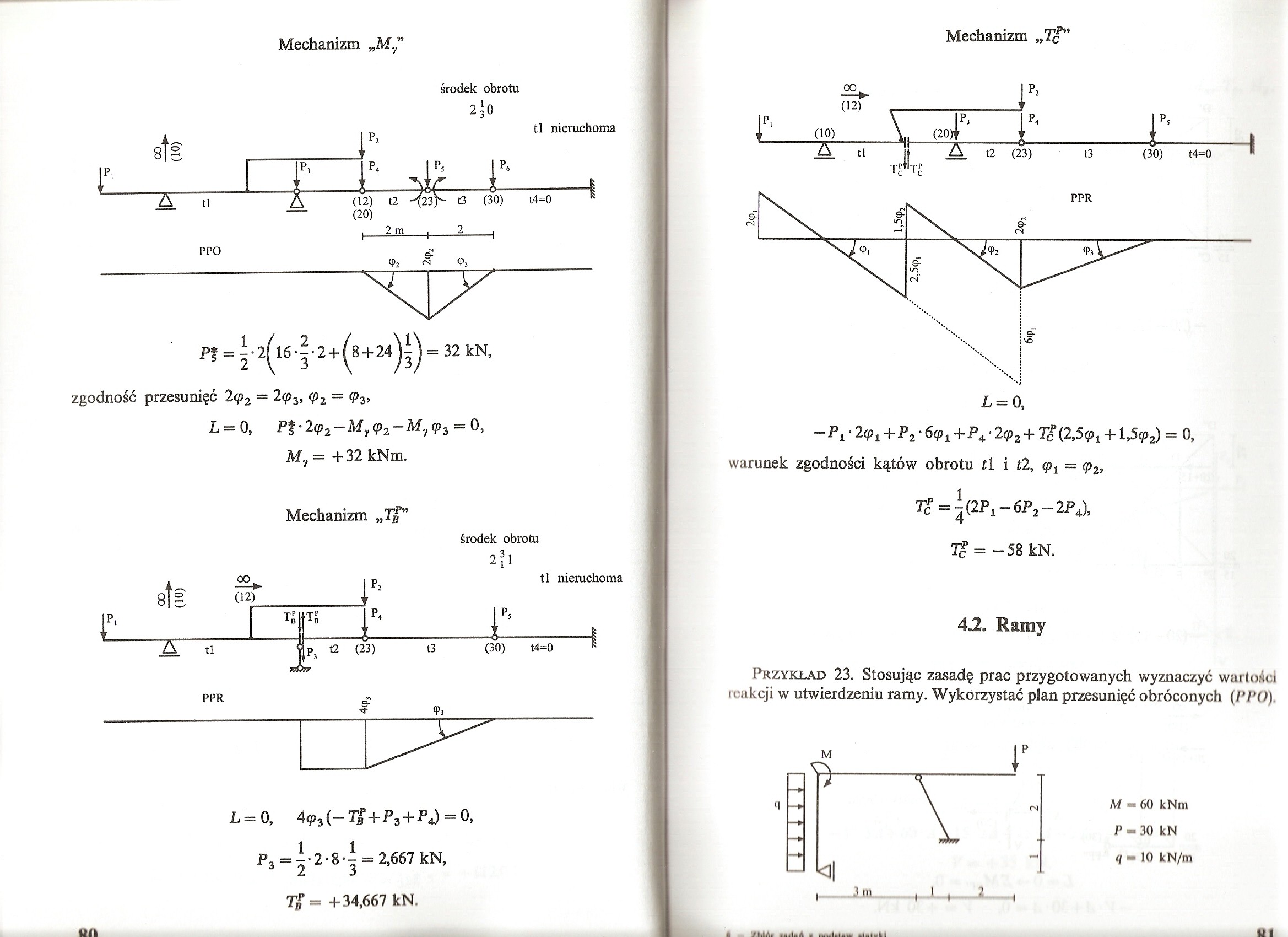
Mechanizm „My”
środek obrotu 23O
tl nieruchoma
iż—i
(12) t2 -g&p- t3 (30) t4=0
(20)
. 2 m | 2 |
PPO

32 kN.
Pf
?iu-\i-2+(8+24)9
zgodność przesunięć 2ę>2 — 2ę>3, ę>2 = ę>3,
L = 0, Pf *2ę>2—Myę>2—My ę>3 = 0,
My = +32 kNm.
Mechanizm „73*”

Tp
łB
ti
PPR
środek obrotu

L = 0, 4.}>3(-7f+i>3+P4) = 0>
P3 = ^2-8-| = 2,667kN,
T/ = +34,667 kN.
|
1P' (10) |
V ^ |
p4 |
g |
I | |
|
A ti |
ii A t2 (23) |
t3 |
(30) t4=0 |
1 | |
TPtIjP *c lc
-pi' 2<Pt + p2 • 6<Pt +p4.* 2ę>2 + Tc (2,5q>l + l,5ę>2) = O, warunek zgodności kątów obrotu tl i tl, q>t = ę2,
^ = i(2P1-6P2-2Pi),
Ti = —58 kN.
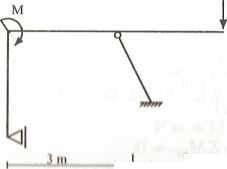
4.2. Ramy
Przykład 23. Stosując zasadę prac przygotowanych wyznaczyć wartości reakcji w utwierdzeniu ramy. Wykorzystać plan przesunięć obróconych (PPO).
+
H-
1
M — 60 kNm P - 30 kN 4-10 kN/m

Wyszukiwarka
Podobne podstrony:
78241 skanuj0030 (80) Mechanizm „W środek obrotu 2 3 0 p5 = 5*4U* 8+
mechanika73 Chwilowy środek obrotu W danej chwili t > 0, tarczy będącej w ruchu płaskim odpowiada
fragment cinacalcet all tors m X-Quest: studas53@unix © © ® © 3D-C0NSTRAIN Sub -menu I Tl_6 12 3 T2
Rys. 39. Cztery rodzaje pracy sterownika Tyrystory Tl i 74 oraz T2 i T3 sterownika są na przemian za
skanuj0032 (70) Mechanizm „M”, PPO wielkość wirtualna Mechanizm itH”, PPO D" B" środek obr
skanuj0035 (64) Mechanizm „S PPO BPPOy Mechanizm „V”, PPO (12) środek obrotu 1 4
Mechanika64 Dane: <%, OA —rj BD = BC =f Szukane: (oBC, vc V Chwilowy środek obr
mechana2wrzesien2008cw7 Zadania egzaminacyjne z Mechaniki 2 u prof. Sado 11IX 2008 o O - środek obro
35401 Mechanika38 3. Ruch płaski - c.d.Zastępcza oś obrotu. C - zastępczy środek obrotu. Rys. Ruch p
86749 Mechanika39 3. Ruch płaski - c.d.Chwilowa oś obrotu. S—chwilowy środek obrotu -
mechana2wrzesien2008cw7 Zadania egzaminacyjne z Mechaniki 2 u prof. Sado 11IX 2008 © O - środek obro
skanuj0008 (75) .51) 11 ijj j-42p [: l u i* ^CjdLfŁjS_i py^Lł^jt^cxx?ę^r 1 &
więcej podobnych podstron