skanuj0407
tworzą człony: łożyska — wał wykorbiony — korbowód — tłok — tuleja cylindra (korpus). Zespoły par tworzą często bardzo złożone łańcuchy kinematyczne, np. w układach napędowych obrabiarek (rys. 11.38 i 11.39). W zależności od liczby członów i liczby par kinematycznych można określić liczbę stopni swobody łańcucha, czyli tzw. ruchliwość mechanizmu. Dla łańcuchów płaskich, w których tory ruchu poszczególnych członów leżą w jednej płaszczyźnie, ruchliwość mechanizmu określa zależność w = 3 (w— 1) — 2p5 —1/?4 (16.2)
w której:
w — ruchliwość (stopień ruchliwości) mechanizmu płaskiego, n — liczba członów, p5 — liczba par klasy V,
Pa — liczba par klasy IV.
W budowie maszyn są stosowane różnorodne mechanizmy, które w zależności od ich konstrukcji i zasad działania można podzielić na mechanizmy:
• ruchu obrotowego (zębate, cierne, cięgnowe),
• śrubowe,
• dźwigniowe (wraz z korbowymi i jarzmowymi),
• krzywkowe,
• o przerywanym ruchu członu biernego (m.in. zapadkowe, tzw. krzyż maltański),
• z elementami sprężystymi i inne.
16.2. Mechanizmy dźwigniowe
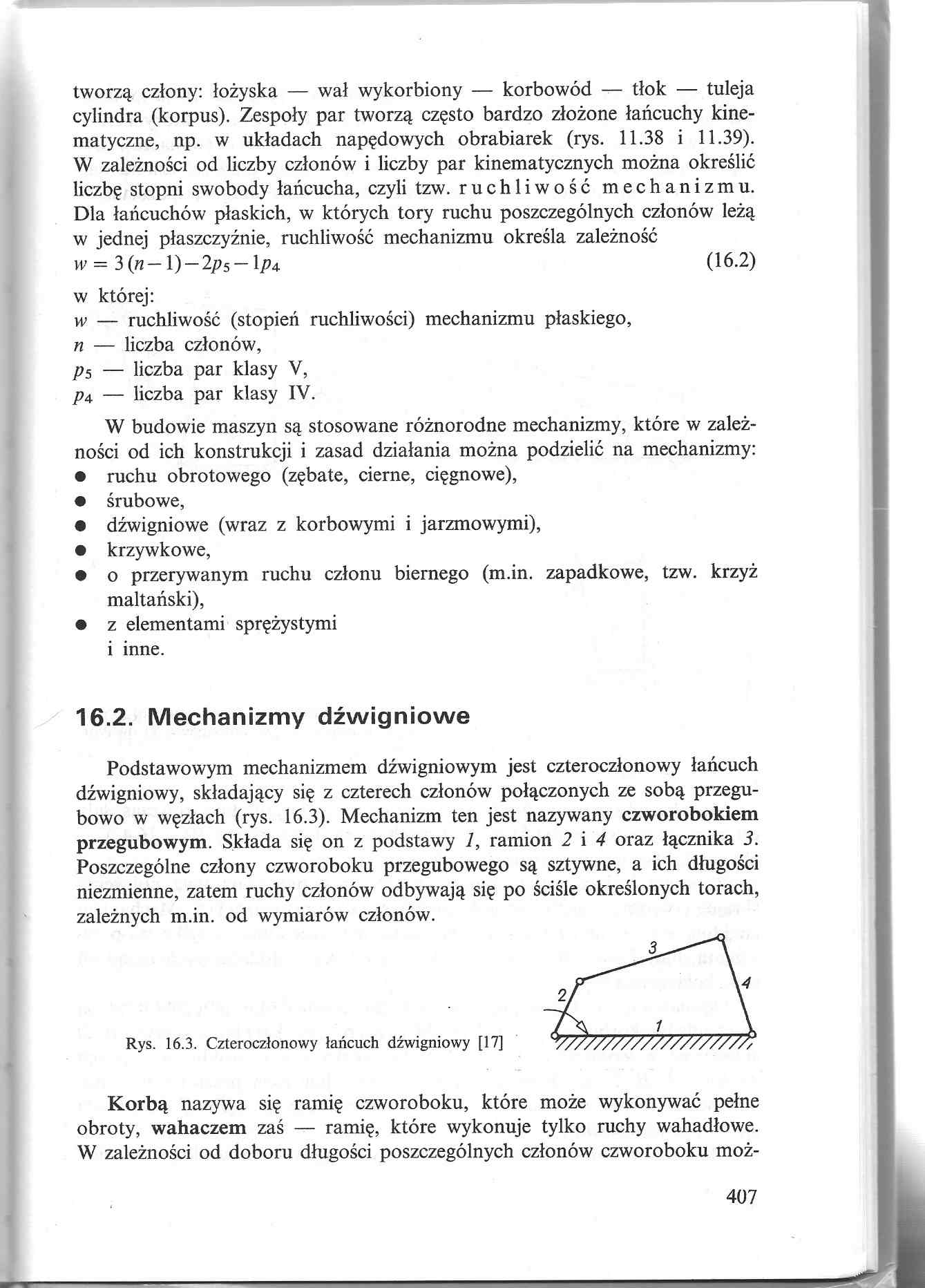
Podstawowym mechanizmem dźwigniowym jest czteroczłonowy łańcuch dźwigniowy, składający się z czterech członów połączonych ze sobą przegubowo w węzłach (rys. 16.3). Mechanizm ten jest nazywany czworobokiem przegubowym. Składa się on z podstawy 1, ramion 2 i 4 oraz łącznika 3. Poszczególne człony czworoboku przegubowego są sztywne, a ich długości niezmienne, zatem ruchy członów odbywają się po ściśle określonych torach, zależnych m.in. od wymiarów członów.

Korbą nazywa się ramię czworoboku, które może wykonywać pełne obroty, wahaczem zaś — ramię, które wykonuje tylko ruchy wahadłowe. W zależności od doboru długości poszczególnych członów czworoboku moż-
407
Wyszukiwarka
Podobne podstrony:
57258 skanuj0191 (4) Rys. 9.2. Rodzaje wałów i osi: a) wał gładki pędniany, b, c) wały schodkowe, d)
skanuj0015 (179) Schemat napędów pras mechanicznych a- korbowa, b- mimosrodowa, c- kolanowa, d- klin
038 etz250 Rys. 60. Zakładanie łożyskagłówn ego wału korbowego 4.2. Zakładanie wału korbowego, skrzy
93 (45) Łożyska kulkowe wału korbowego chociaż wykonane z bardzo dużą dokładnością, mogą mieć po wci
skanuj0026 (174) pfenieaiony sprzęt jest jednak na wyposażeniu służby zdrowia (najczęściej zespołów
skanuj0121 (21) AKTYWNE SŁUCHANIE ĆWICZENIA UZUPEŁNIAJĄCE Inny wariant W parach lub 4-6-osobowych ze
skanuj0026 (174) pfenieaiony sprzęt jest jednak na wyposażeniu służby zdrowia (najczęściej zespołów
skanuj0045 (57) 6.4. Zróżnicowanie krajobrazów 255 części polskich wyżyn znalazły ochronę także w Ze
skanuj0470 p AA Rys. 4.58. Nomogram służący do odczytywania współrzędnych cylindrycznych węzłów siec
skanuj0162 bmp 5. Zintegrowane ratownictwo medyczne 163 skażenie chemiczne itp.), niedostępnej dla z
72725 PICT0122 Kruszarka stożkowa o stożkach zbieżnych 1 - wał główny, 2 - stożek rozdrabniający, 3
skanuj0012 (8) Gra trwa 2x30 minut z 10-minutową przerwą na odpoczynek. Każdy zespół ma w całym mecz
więcej podobnych podstron