str042 (3)
...i.......Miwiiyuiiyitii nt|: pomini |»■ .1 u 111<hi(l|ni|linu | |i mn/ 1 ilu 1 >mI<>iil<i błędów /ngmów •.iilnllty
<\ I odbiorniku o„ wchodzące w nkłud czynniku Nu
4.1.3.2. Błąd zegara satelity
Wyznaczenie przez odbiornik chwilowej wartości błędu zegara satelity jest autonomicznie niemożliwe. Stąd też segment kontrolny systemu, w momentach korygowania i uzupełniania danych każdego z satelitów, wyznacza parametry (współczynniki), których przekazanie przez satelitę użytkownikowi umożliwi obliczenie błędu zegara satelity na moment pomiaru pozycji. Otrzymanie w ramach transmitowanej przez każdego z satelitów depeszy GPS, wartości współczynników należy podstawić po stronie odbiornika do wielomianu 2-go stopnia, ,iby wyznaczyć chwilową wartość błędu zegara satelity na moment obserwacji t zgodnie / zależnością:
5.Xt)=af0 + a/l(t-toc) + af2(t-toJ2+Atr , (4.16)
gdzie:
am, a,h Up, - współczynniki wielomianu korekty zegara satelity,
- moment czasu, do którego odniesione są transmitowane dane (współczynniki), Ar, - błąd czasu wynikający z efektu relatywistycznego, którego wartość można obliczyć
na podstawie zależności:
Aćr = F • e • (A)ln sin(Ek ) , (4.17)
gdzie:
i siała systemowa,
< mlmośród orbity satelity,
I długość dużej półosi orbity satelity,
/.< anomalia mimośrodowa.
Niezbędne dla tej operacji matematycznej parametry orbity (e, A, Ek) transmitowane są w <’ I 3 podramce nawigacyjnej depeszy GPS, natomiast wartość stałej F można obliczyć juko:
F = = -4.442807633(10)'10 -4= , (4.18)
C V/H
gdzie:
p 3,086005-101*' m3 s-2 - stałą grawitacyjna, i -2.09792458‘108 m s_1 - prędkość fali elektromagnetycznej.
4.1.3.3. Metody pomiaru pseudoodległości
W oparciu o sygnały emitowane przez satelity GPS można zasadniczo realizować 3 typy pomiarów:
»- kodowe - stosowane w nawigacji, stanowiące podstawowy typ pomiarów GPS, zapewniające charakterystyki systemu opisane w rozdziale II,
- Iiizowe - wykorzystywane w aplikacjach wymagających wysokiej precyzji. Niejednokrotnie pomiar fazowy jest uzupełnieniem pomiaru odbiorników kodowych,
- dopplerowskie - przeznaczone dla wyznaczania prędkości poruszającego się obiektu.
Dwlo f)li)iwn/n mnlody dotycz .| pomiaru pimudoodląglośi 11 wyziwu.znnlM wnpóli/ędnych po |ndync/ego odbiornika ul", leli leż będą dotyczyi kolwjnu podro/d/lnly opisująca uparn mtitomntyczny, będący podstawą wyznaczeń wapóltzędnych GIJS
4.1.3.3.1. Pomiary kodowo
4.1.3.3.1.1. Istota pomiaru kodowego
Pomiary kodowe są podstawową metodą pomiarową stosowaną w systemie GPS lnom tycznemu aspektowi tegoż zagadnienia poświęcony jest jeden z kolejnych rozdziałów. Jednaka ze względu na konieczność wyróżnienia na tym etapie książki typów pomiarów, niezbędno jot ogólne wprowadzenie do tej metody pomiaru.
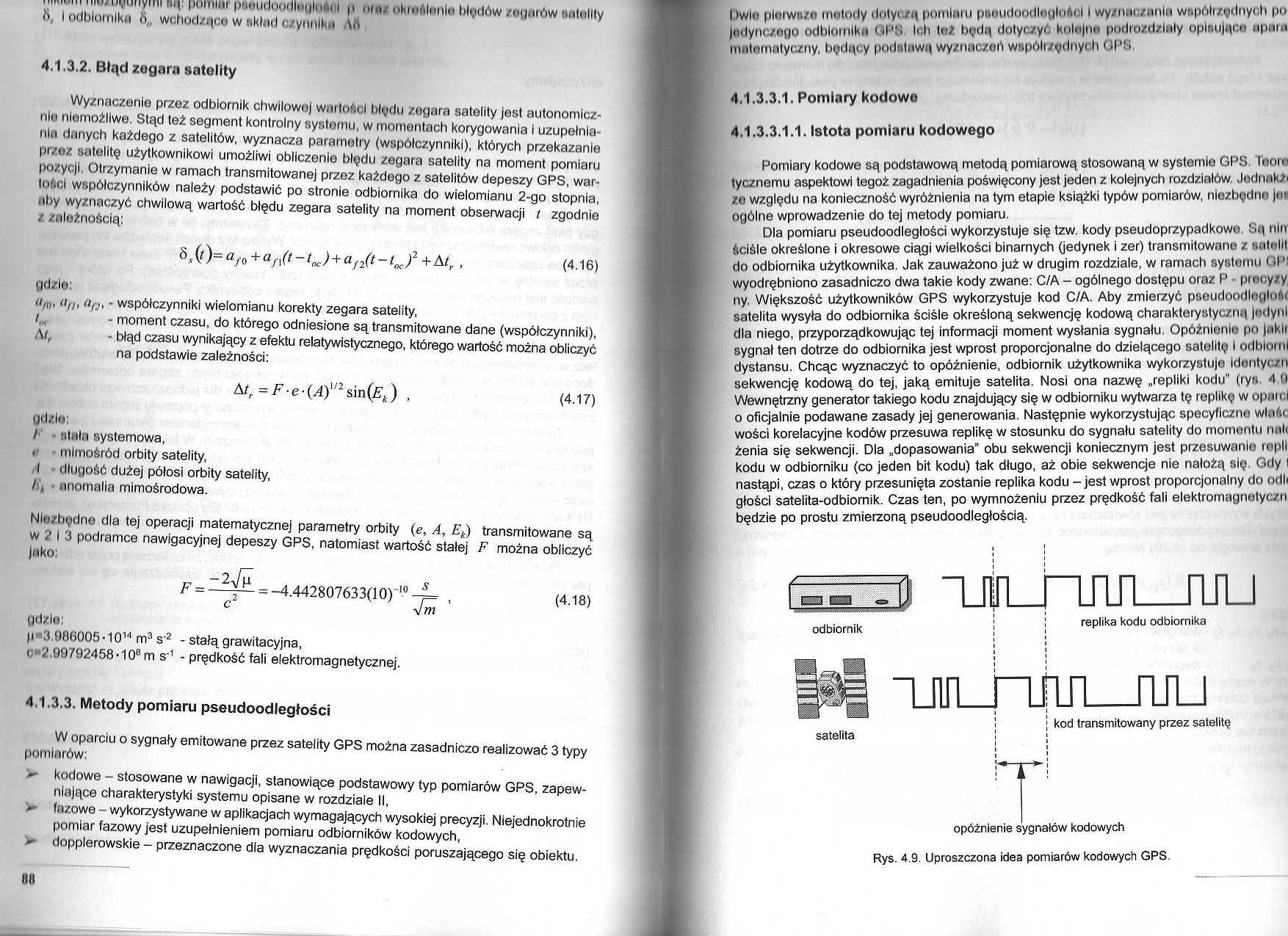
Dla pomiaru pseudoodleglości wykorzystuje się tzw. kody pseudoprzypadkowo Są nln ściśle określone i okresowe ciągi wielkości binarnych (jedynek i zer) transmitowane z siitnlll do odbiornika użytkownika. Jak zauważono już w drugim rozdziale, w ramach systemu Ul •: wyodrębniono zasadniczo dwa takie kody zwane: C/A - ogólnego dostępu oraz P pmoyzy ny. Większość użytkowników GPS wykorzystuje kod C/A. Aby zmierzyć pseudoodloglmW satelita wysyła do odbiornika ściśle określoną sekwencję kodową charakterystyczną jodynl dla niego, przyporządkowując tej informacji moment wysłania sygnału. Opóźnienie po jnkll sygnał ten dotrze do odbiornika jest wprost proporcjonalne do dzielącego satelitę i odblornl dystansu. Chcąc wyznaczyć to opóźnienie, odbiornik użytkownika wykorzystuje identyi zn sekwencję kodową do tej, jaką emituje satelita. Nosi ona nazwę „repliki kodu” (ryn A u Wewnętrzny generator takiego kodu znajdujący się w odbiorniku wytwarza tę replikę w opnici o oficjalnie podawane zasady jej generowania. Następnie wykorzystując specyficzne wltW wości korelacyjne kodów przesuwa replikę w stosunku do sygnału satelity do momentu mili żenią się sekwencji. Dla „dopasowania” obu sekwencji koniecznym jest przesuwaniu mpll kodu w odbiorniku (co jeden bit kodu) tak długo, aż obie sekwencje nie natożą się. Gdy i nastąpi, czas o który przesunięta zostanie replika kodu - jest wprost proporcjonalny do odli głości satelita-odbiornik. Czas ten, po wymnożeniu przez prędkość fali elektromagnetyozn będzie po prostu zmierzoną pseudoodległością.
odbiornik
satelita
~uiLrLnji_juLj
replika kodu odbiornika
kod transmitowany przez satelitę
opóźnienie sygnałów kodowych
Rys. 4.9. Uproszczona idea pomiarów kodowych GPS.
Wyszukiwarka
Podobne podstrony:
CCF20081206�003 t i i im li mu 111 ■ i vin ni u il iilkiiwi 1111 W Iml, u li tiul ii hi im nk m Alu
page0258 Zygmunt 111. a&g cii ni i. Do tegoż związku usiłował Zebrzydowski woj
4 godz. 3:00 j ł ii i a H Bi i Jl [■ REDUKCJA PUNKTÓW KARNYCH 4 godz. 13.00 iŁ IL
hist1 (2) Jp3 i i . ■Hi r ni tS -f-f-p tH —1 gagi — p I =*4-
^IM
DSC00080 (15) <
SNV36604 HI NI VMI NI Al l/M 567 lowmusl dwImlumoM lltoiiiuk l^
Scan39 • i*.. , nika jeszcze jeden istotny wniosek, że każdy system jest sys- , i ....... 111 hi. g
f if! r i i !{] ii Iii m ipii If! Mil! li! ! hi f ni f w iii fi If Im ; l}
ideiupz^noio ŁinA^e ■111 i Hi • h Ijii* ! 1
DSC04569 ZNACZĄCE REASORTACJE : 1918 r HI/NI yryp4 hiszpanka (prawdopodobni pochodząca Ml świń)
Scan39 • i*.. , nika jeszcze jeden istotny wniosek, że każdy system jest sys- , i ....... 111 hi. g
pjafojd - ss
Ił! IH H! HI ni m B ii* tu ni im ni mmmmmm mmmmmmBi ui mm iu ih miliinniiHiii Ul Ht!!! !!lfH!2 mmmmm
więcej podobnych podstron