Str312 (2)
L,
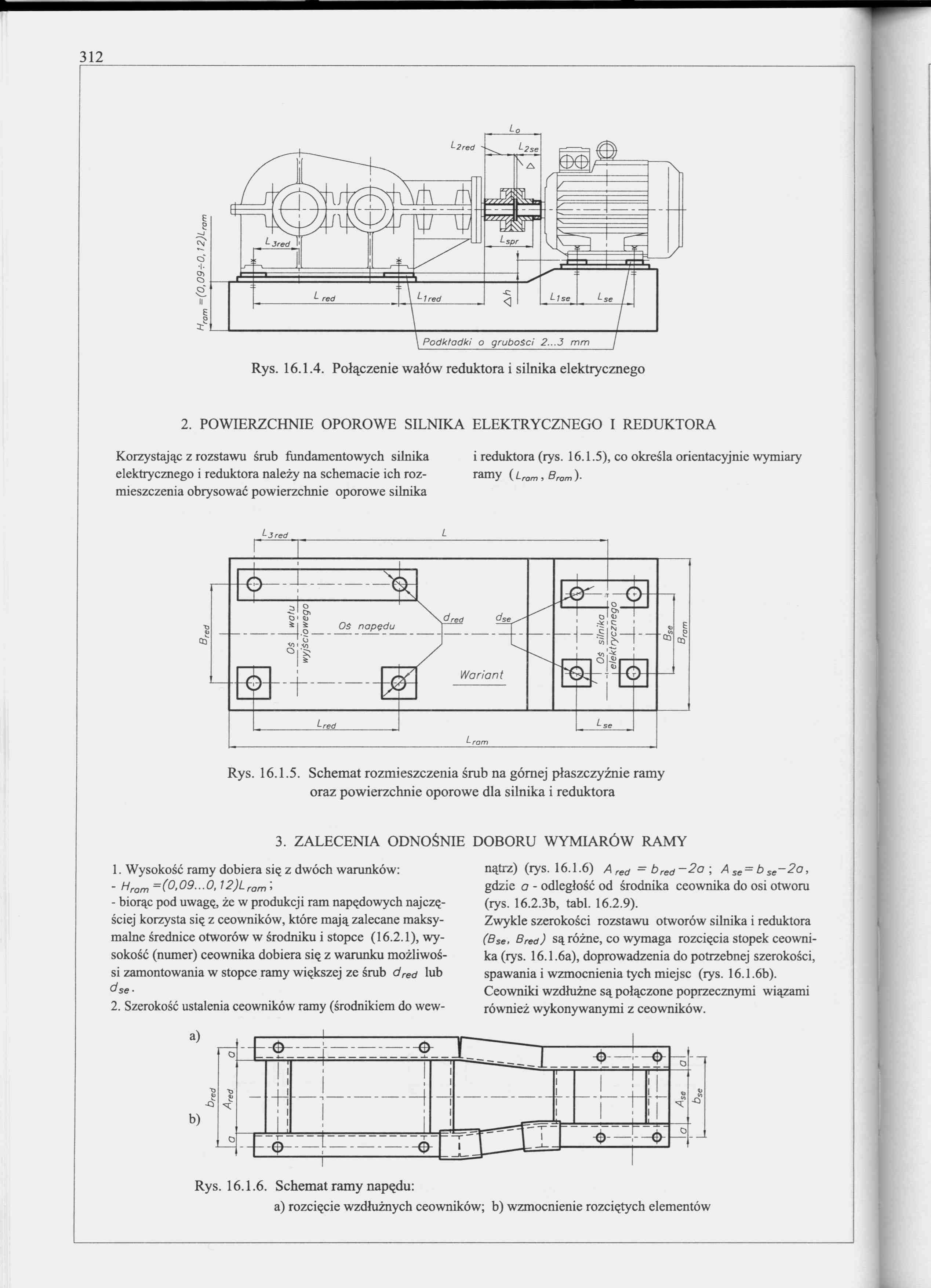
Rys. 16.1.4. Połączenie wałów reduktora i silnika elektrycznego
2. POWIERZCHNIE OPOROWE SILNIKA ELEKTRYCZNEGO I REDUKTORA
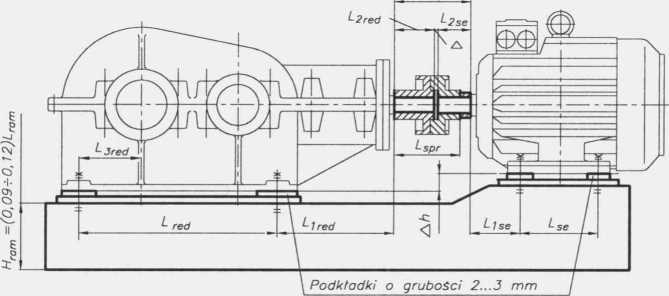
Korzystając z rozstawu śrub fundamentowych silnika i reduktora (rys. 16.1.5), co określa orientacyjnie wymiary
elektrycznego i reduktora należy na schemacie ich roz- ramy {Lram, Bram).
mieszczenia obrysować powierzchnie oporowe silnika
t J red t
Rys. 16.1.5. Schemat rozmieszczenia śrub na górnej płaszczyźnie ramy oraz powierzchnie oporowe dla silnika i reduktora
3. ZALECENIA ODNOŚNIE DOBORU WYMIARÓW RAMY
1. Wysokość ramy dobiera się z dwóch warunków:
- Hram =(0,09...0, 12)Lrom ;
- biorąc pod uwagę, że w produkcji ram napędowych najczęściej korzysta się z ceowników, które mają zalecane maksymalne średnice otworów w środniku i stopce (16.2.1), wysokość (numer) ceownika dobiera się z warunku możliwoś-si zamontowania w stopce ramy większej ze śrub dred lub dse.
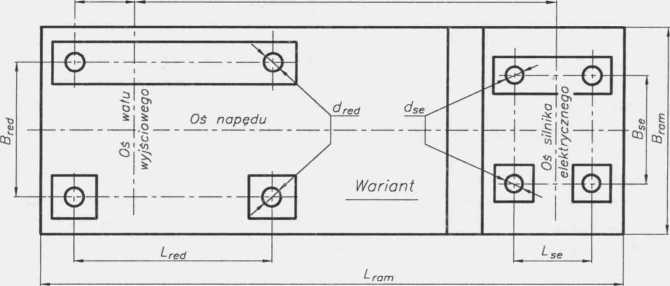
2. Szerokość ustalenia ceowników ramy (środnikiem do wewnątrz) (rys. 16.1.6) A red = bred-2a ; Ase = bse-2a, gdzie a - odległość od środnika ceownika do osi otworu (rys. 16.2.3b, tabl. 16.2.9).
Zwykle szerokości rozstawu otworów silnika i reduktora (Bse, Bred) są różne, co wymaga rozcięcia stopek ceownika (rys. 16.1.6a), doprowadzenia do potrzebnej szerokości, spawania i wzmocnienia tych miejsc (rys. 16.1.6b). Ceowniki wzdłużne są połączone poprzecznymi wiązami również wykonywanymi z ceowników.
Rys. 16.1.6. Schemat ramy napędu:
a) rozcięcie wzdłużnych ceowników; b) wzmocnienie rozciętych elementów
Wyszukiwarka
Podobne podstrony:
IMG00312 312 Rys. 16.1.4. Połączenie wałów reduktora i silnika elektrycznego2. POWIERZCHNIE OPOROWE
Rys. 16.4.4 382 Oś wału silnika elektrycznego V r-*- Charakterystyka techniczna Pse
2tom130 5. MASZYNY ELEKTRYCZNE 262 Rys. 5.16. Stopień obciążenia kp silnika w zależności od względne
img038 (16) 10 I Wskazać reduktor i utleniacz (elektronator i dezelektronator), a następnie uło żyć
Odchyłka płaskości (rys. 16) jest to największa odległość punktów powierzchni rzeczywistej od
Untitled5 15 16* - schemat układu klimatyzacji Rys. 1Q.5. Schemat połączeń układu chłodzenia silnika
IMG00318 F (1:2) 4x014 6x018 ? Oś walu silnika elektrycznego Rys. 16.3.1 SCHEMAT ROZMIESZCZENIA ŚRUB
CCI20111111�183 rowego stosowanego do zabezpieczenia silników elektrycznych przed przeciążeniem (rys
Schemat obwodu elektrycznego silnika wysokoprężnego 10 11 12 13 15 10 11 12
więcej podobnych podstron