instalacje169
DODATEK 218
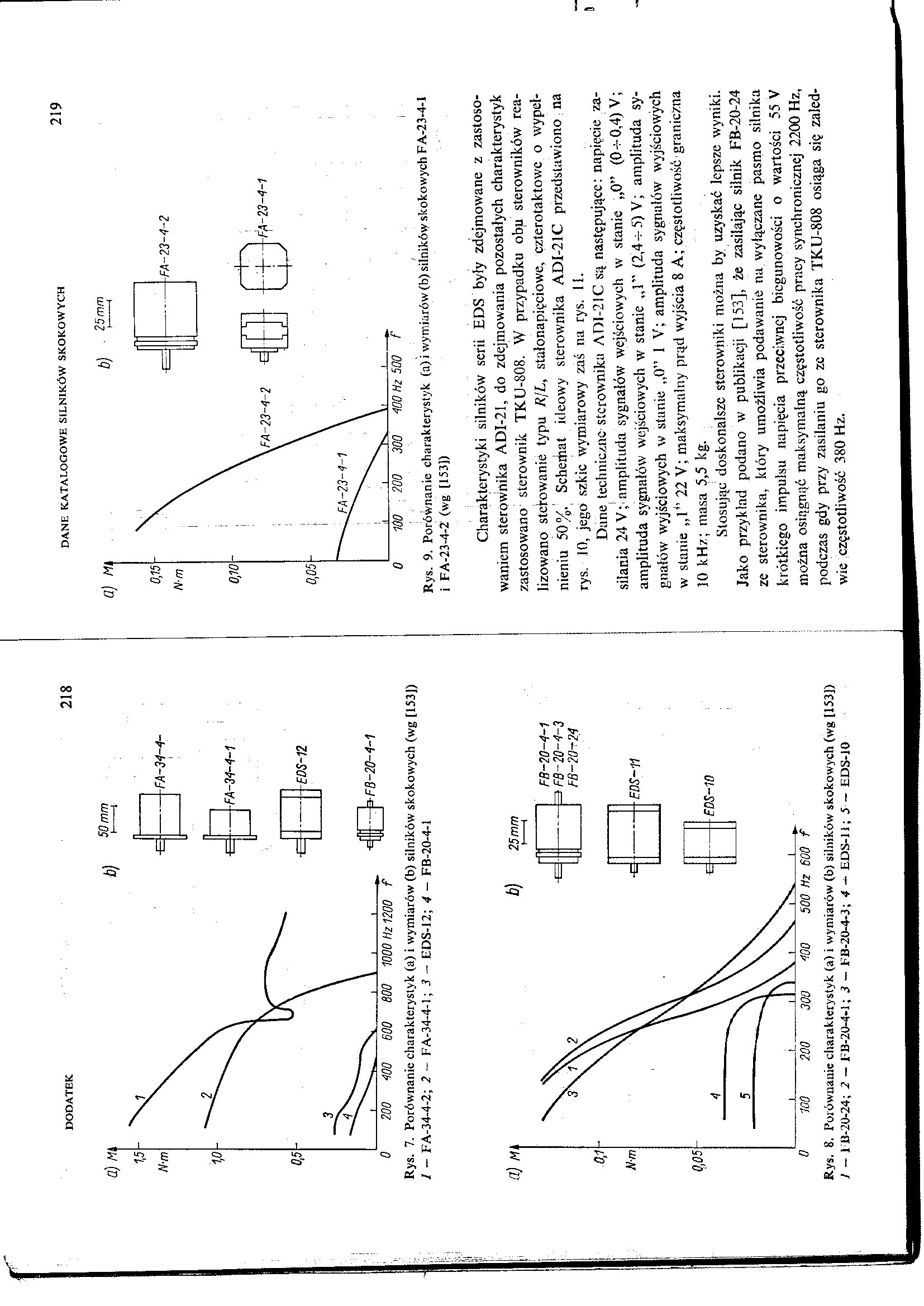
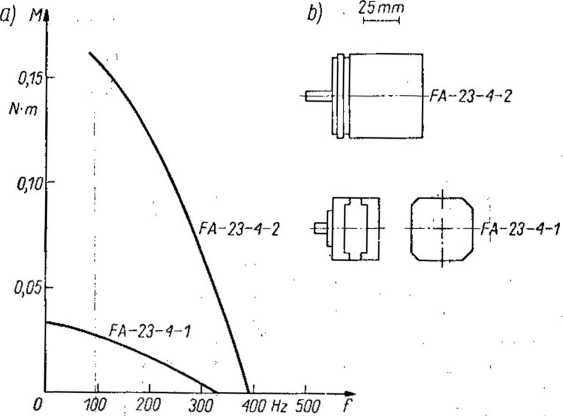
Rys. 7. Porównanie charakterystyk (a) i wymiarów (b) silników skokowych (wg [153 j) 1 - FA-34-4-2; 2 - FA-34-4-1; 3 - EDS-12; 4 - FB-20-4-1
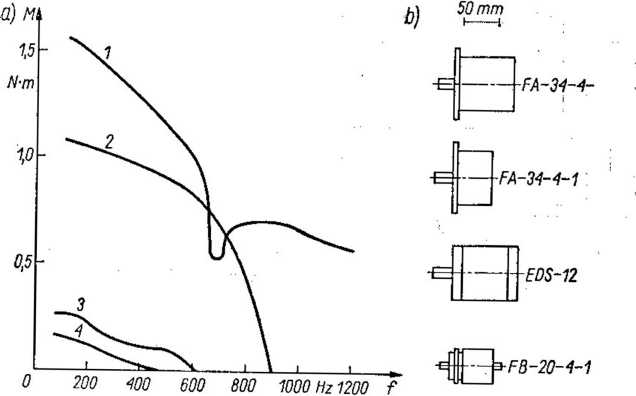
Rys. 8. Porównanie charakterystyk (a) i wymiarów (b) silników skokowych (wg [153]) 1 - 113-20-24; 2 — FB-20-4-1; 3 — FB-20-4-3; 4 ~ EDS-11; 5■— EDS-iO
j i i
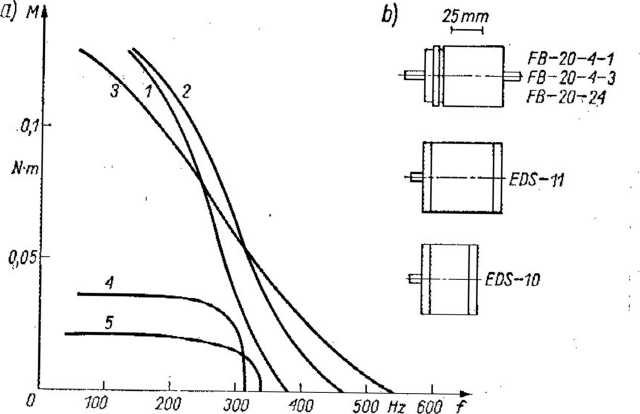
Rys. 9. Porównanie charakterystyk (a) i wymiarów (b) silników skokowych FA-23-4-i i FA-23-4-2 (wg [153])
Charakterystyki silników serii EDS były zdejmowane z zastosowaniem sterownika ADI-21, do zdejmowania pozostałych charakterystyk zastosowano sterownik TKU-808. W przypadku obu sterowników realizowano stej-owanie typu RjL, stałonapięciowe, czterotaktowe o wypełnieniu 50%. Scheihat ideowy sterownika ADI-21C przedstawiono: na rys. 10, jego szkic wymiarowy zaś na rys. li.
Dane techniczne sterownika AD1-21C są następujące: napięcie zasilania 24 V;i amplituda sygnałów wejściowych w stanie „0” (0-^0,4) V; amplituda sygnałów wejściowych w stanie „1” (2,4 — 5) V; amplituda sygnałów wyjściowych w stanie „0” 1 V; amplituda sygnałów wyjściowych w stanie „1*’ 22 V; maksymalny prąd wyjścia 8 A; częstotliwość graniczna 10 kHz; masa 5,5 kg.
Stosując doskonalsze sterowniki można by uzyskać lepsze wyniki. Jako przykład podano w publikacji [153], że zasilając silnik FB-20-24 ze sterownika, który umożliwia podawanie na wyłączane pasmo silnika krótkiego impulsu napięcia przeciwnej biegunowości o wartości 55 V można osiągnąć maksymalną częstotliwość pracy synchronicznej 2200 Hz, podczas gdy przy zasilaniu go ze sterownika TKU-808 osiąga się zaledwie częstotliwość 380 Hz.
Wyszukiwarka
Podobne podstrony:
instalacje166 DODATEK 212 Rys. 2. Szkice wymiarowe i schematy połączeń silników skokowych typu FB-20
instalacje168 DODATEK 216 Rys. 4. Hybrydowy silnik skokowy FA-34-4 (wg [158]): a) szkic wymiarowy; b
38379 instalacje170 DODATEK 220 Rys. 10. Schemat ideowy sterownika ADI-21C (wg [163]) Rys. 11. Szkic
IMG225 225 Rys. 19.U. Charakterystyki obciążeniowe silnika asynchronicznego część, która Jest niesta
Ą > <h > -Pi Rys. 12. Charakterystyki mechaniczne silnika bocznikowego prądu stałego przy r
066 6 3. KOTŁY PAROWE Rys. 3.6. Porównanie charakterystycznych parametrów paliw A - zawartość popioł
CCF20111125�011 (4) Rys. 16. Charakterystyki mechaniczne silnika szeregowego z samowzbudzeniem.4.2.
CCF20111125�019 (2) Rys. 26. Charakterystyczna mechaniczna silnika bocznikowego (obcowzbudnego)
CCF20111125�020 Rys. 28. Charakterystyki mechaniczne silnika obcowzbudnego. Rezystancję podano
Rys. 1. Typowe charakterystyki mechaniczne silników elektrycznych 1 - synchroniczna, 2 - bocznikowa,
2tom256 6. NAPĘD ELEKTRYCZNY 514 6. NAPĘD ELEKTRYCZNY 514 Rys. 6.57. Charakterystyki statyczne silni
33275 instalacje123 4. TEORIA SILNIKA SKOKOWEGO 128 Rys. 4.2J. Układ sterowania silnika skokowego z
więcej podobnych podstron