OMiUP t2 Gorski01
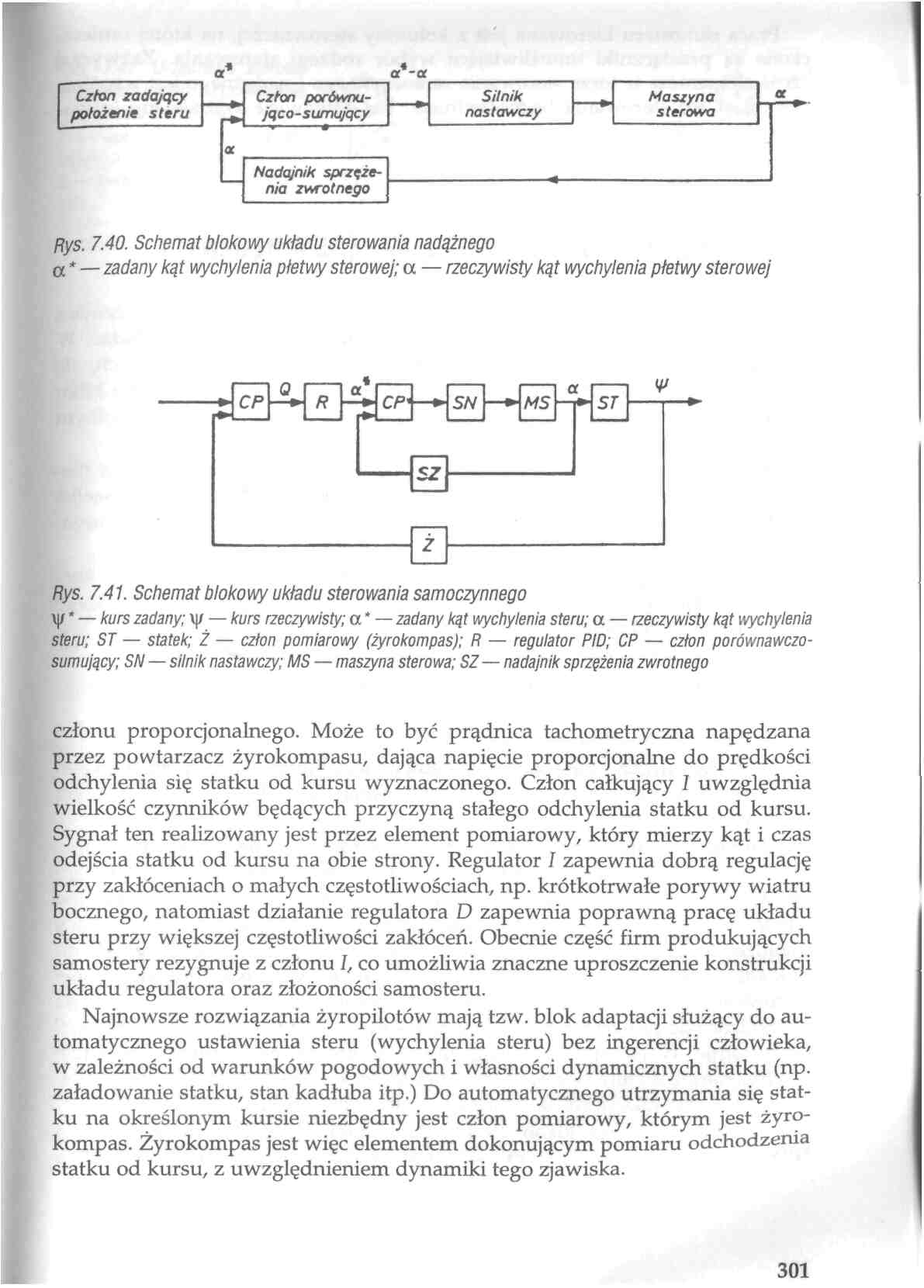

Rys. 7.40. Schemat blokowy układu sterowania nadążnego
a * — zadany kąt wychylenia płetwy sterowej; a — rzeczywisty kąt wychylenia płetwy sterowej
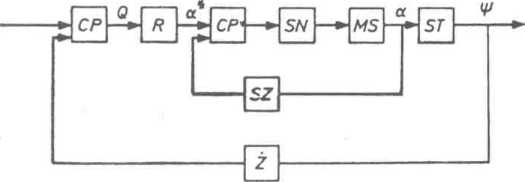
Rys. 7.41. Schemat blokowy układu sterowania samoczynnego
\|/ * — kurs zadany; \j/ — kurs rzeczywisty; a * — zadany kąt wychylenia steru; a — rzeczywisty kąt wychylenia steru; ST — statek; Ż — człon pomiarowy (żyrokompas); R — regulator PID; CP — człon porównawczo-sumujący; SN — silnik nastawczy; MS — maszyna sterowa; SZ — nadajnik sprzężenia zwrotnego
członu proporcjonalnego. Może to być prądnica tachometryczna napędzana przez powtarzacz żyrokompas u, dająca napięcie proporcjonalne do prędkości odchylenia się statku od kursu wyznaczonego. Człon całkujący 1 uwzględnia wielkość czynników będących przyczyną stałego odchylenia statku od kursu. Sygnał ten realizowany jest przez element pomiarowy, który mierzy kąt i czas odejścia statku od kursu na obie strony. Regulator / zapewnia dobrą regulację przy zakłóceniach o małych częstotliwościach, np. krótkotrwałe porywy wiatru bocznego, natomiast działanie regulatora D zapewnia poprawną pracę układu steru przy większej częstotliwości zakłóceń. Obecnie część firm produkujących samostery rezygnuje z członu /, co umożliwia znaczne uproszczenie konstrukcji układu regulatora oraz złożoności samosteru.
Najnowsze rozwiązania żyropilotów mają tzw. blok adaptacji służący do automatycznego ustawienia steru (wychylenia steru) bez ingerencji człowieka, w zależności od warunków pogodowych i własności dynamicznych statku (np. załadowanie statku, stan kadłuba itp.) Do automatycznego utrzymania się statku na określonym kursie niezbędny jest człon pomiarowy, którym jest żyrokompas. Żyrokompas jest więc elementem dokonującym pomiaru odchodzenia statku od kursu, z uwzględnieniem dynamiki tego zjawiska.
301
Wyszukiwarka
Podobne podstrony:
OMiUP t2 Gorski(6 Rys. 7.27. Schemat blokowy urządzenia sterowego o układzie zamkniętym (ze sprzężen
60696 OMiUP t2 Gorski19 Rys. 7.55. Schemat mechanicznego układu rozrządu maszyny sterowej 1 — kolumn
51714 OMiUP t2 Gorski20 Rys. 7.56. Schemat hydraulicznego układu rozrządu maszyny sterowej 1 _ cylin
OMiUP t2 Gorski39 Rys. 7.71. Schemat działania układu sprzężenia zwrotnego urządzenia sterowego z uk
OMiUP t2 Gorski07 Rys. 7.48. Schemat hydrauliczny maszyny sterowej z napędem ręcznym i siłownikiem t
60452 OMiUP t2 Gorski43 Rys. 7.74. Schemat elektrohydraulicznego urządzenia sterowego z pompami o zm
więcej podobnych podstron