P1080255
6. Programowanie robotów przemysłowych
T - zegar {timer),
K - stała (wartość zadana).
Występują też w programach bloki komparatorów, które sprawdzając róż- I ne warunki, ustawiają w stan wysoki tylko jeden ze wskazanych elementów I wyjściowych - tabl. 6.2.
Tablica 6.2. Adresy relacji matematycznych
|
Nazwa relacji Symbol matematyczny |
Skrót nazwy angielskiej |
|
równy I ' — |
EQ |
|
większy > |
GT |
|
większy hib równy ż |
GE |
|
mniejszy < |
Ł? |
|
mniejszy lub równy |
LE |
|
nierówny - <> |
NE |
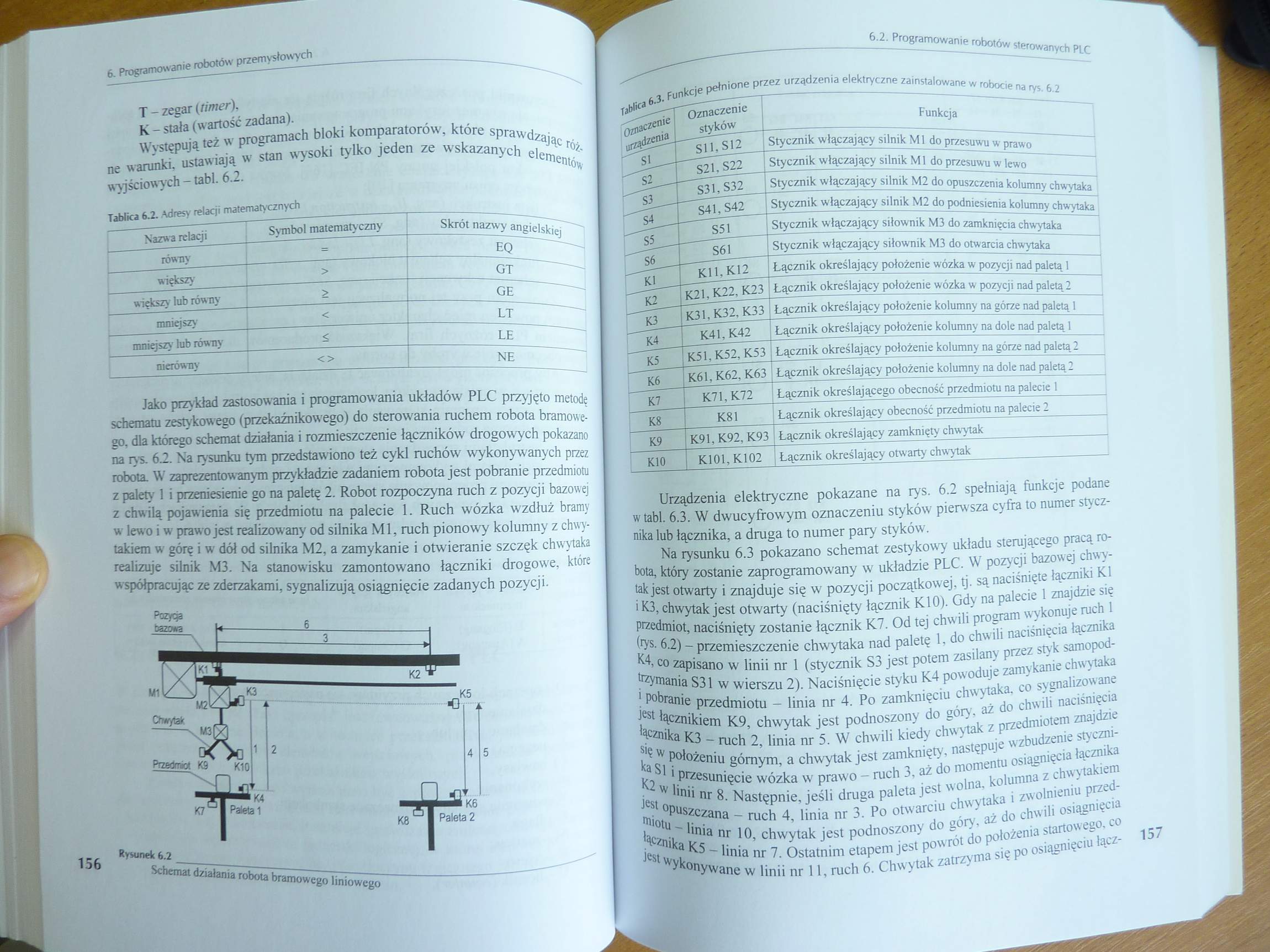
Jako przykład zastosowania i programowania układów PLC przyjęto metodę schematu zestykowego (przekaźnikowego) do sterowania ruchem robota bramowe-1 go, dla którego schemat działania i rozmieszczenie łączników drogowych pokazano I na rys. 62. Na rysunku tym przedstawiono też cykl ruchów wykonywanych przez I robota. W zaprezentowanym przykładzie zadaniem robota jest pobranie przedmiotu z palety 1 i przeniesienie go na paletę 2. Robot rozpoczyna ruch z pozycji bazowej z chwilą pojawienia się przedmiotu na palecie 1. Ruch wózka wzdłuż bramy I w lewo i w prawo jest realizowany od silnika M1, ruch pionowy kolumny z chwy-l takiem w górę i w dół od silnika M2, a zamykanie i Otwieranie szczęk chwytaka! realizuje silnik M3. Na stanowisku zamontowano łączniki drogowe, które! współpracując ze zderzakami, sygnalizują osiągnięcie zadanych pozycji.
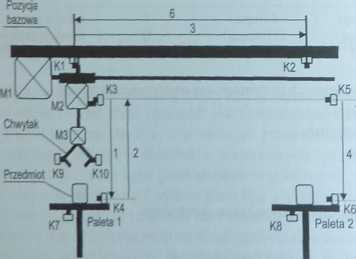
Rysunek 6.2__
Schemat działania robota bramowego liniowego
- funkcje pełnione przez urządzenia elektryczne zainstalowane w robocie na rys. 6.2
|
rabi^>-r |
Oznaczenie styków |
Funkcja |
|
r«t |
S11.S12 |
Stycznik włączający silnik M1 do przesuwu w prawo |
|
r§2 |
821, S22 |
Stycznik włączający silnik Ml do przesuwu w lewo |
|
S31.S32 |
Stycznik włączający silnik M2 do opuszczenia kolumny chwytaka 1 | |
|
S41, S42 |
Stycznik włączający silnik M2 do podniesienia kolumny chwytaka i | |
|
S51 |
Stycznik włączający siłownik M3 do zamknięcia chwytaka | |
|
Sól |
Stycznik włączający siłownik M3 do otwarcia chwytaka | |
|
^ići |
KI 1. KI2 |
Łącznik określający położenie wózka w pozycji nad paletą 1 |
|
rTća |
K21.K22, K23 |
Łącznik określający położenie wózka w pozycji nad paletą 2 |
|
K31, K32, K33 |
Łącznik określający położenie kolumny na górze nad paletą 1 | |
|
§1 K4 |
K41, K42 |
Łącznik określający położenie kolumny na dole nad paletą 1 |
|
’ K5 |
K51, K52, K53 |
Łącznik określający położenie kolumny na górze nad paletą 2 |
|
K6 |
K61, K62, K63 |
Łącznik określający położenie kolumny na dole nad paletą 2 |
|
i K7 |
K71,K72 |
Łącznik określającego obecność przedmiotu na palecie 1 |
|
K8 |
KS1 |
1 Łącznik określający obecność przedmiotu na palecie 2 |
|
K9 |
K91, K92, K93 |
Łącznik określający zamknięty chwytak |
|
| KIO |
K101, KI02 |
Łącznik określający otwarty chwytak |
Urządzenia elektryczne pokazane na rys. 6.2 spełniają funkcje podane w tabl. 6.3. W dwucyfrowym oznaczeniu styków pierwsza cyfra to numer stycznika lub łącznika, a druga to numer pary styków.
Na rysunku 6.3 pokazano schemat zestykowy układu sterującego pracą robota, który zostanie zaprogramowany w układzie PLC. W pozycji bazowej chwytak jest otwarty i znajduje się w pozycji początkowej, tj. są naciśnięte łączniki KI i K3, chwytak jest otwarty (naciśnięty łącznik KIO). Gdy na palecie 1 znajdzie się przedmiot, naciśnięty zostanie łącznik K7. Od tej chwili program wykonuje nich 1 (rys. 6.2) - przemieszczenie chwytaka nad paletę 1, do chwili naciśnięcia łącznika K4, co zapisano w Unii nr 1 (stycznik S3 jest potem zasilany przez styk samopod-trzymania S31 w wierszu 2). Naciśnięcie styku K4 powoduje zamykanie chwytaka i pobranie przedmiotu - linia nr 4. Po zamknięciu chwytaka, co sygnalizowane jest łącznikiem K9, chwytak jest podnoszony do góry, aż do chwili naciśnięcia łącznika K3 - mch 2, linia nr 5. W chwili kiedy chwytak z przedmiotem znajdzie się w położeniu górnym, a chwytak jest zamknięty, następuje wzbudzenie stycznika SI i przesunięcie wózka w prawo — ruch 3, aż do momentu osiągnięcia łącznika K2 w linii nr 8. Następnie, jeśli druga paleta jest wolna, kolumna z chwytakiem jest opuszczana - ruch 4, linia nr 3. Po otwarciu chwytaka i zwolnieniu przedmiotu - linia nr 10, chwytak jest podnoszony do góry, aż do chwili osiągnięcia łącznika K5 - linia nr 7. Ostatnim etapem jest powrót do położenia startowego, co jest wykonywane w Unii nr 11, ruch 6. Chwytak zatrzyma się po osiągnięciu łącz-
157
Wyszukiwarka
Podobne podstrony:
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
22382 P1080257 6. Programowanie robotów przemysłowych 125/109 = 006 (115*I23)+I03/I12/I02 = 002 w kt
24317 P1080267 6. Programowanie robotów przemysłowych li wierzchołek został wygenerowany uprzednio,
więcej podobnych podstron