24317 P1080267
6. Programowanie robotów przemysłowych
li wierzchołek został wygenerowany uprzednio, istnieje już droga fe. I cząca go z <i>. Następuje porównanie ocen nowej drogi do co i tej istnie. I jącej, a lepsza staje się jedyną drogą wiodącą do co.
Krok 3. Algorytm kończy działanie, gdy wierzchołek, który ma być rozwiążą. I ny, ma ocenę wyższą niż wierzchołek docelowy ruchu.
Jeżeli mapa otoczenia robota jest aktualizowana odpowiednio często, to I metoda grafu widoczności staje się na tyle efektowna czasowo, że może być I stosowana w trybie czasu rzeczywistego z ruchomymi przeszkodami.
6.5.4. Metoda pól potencjałowych
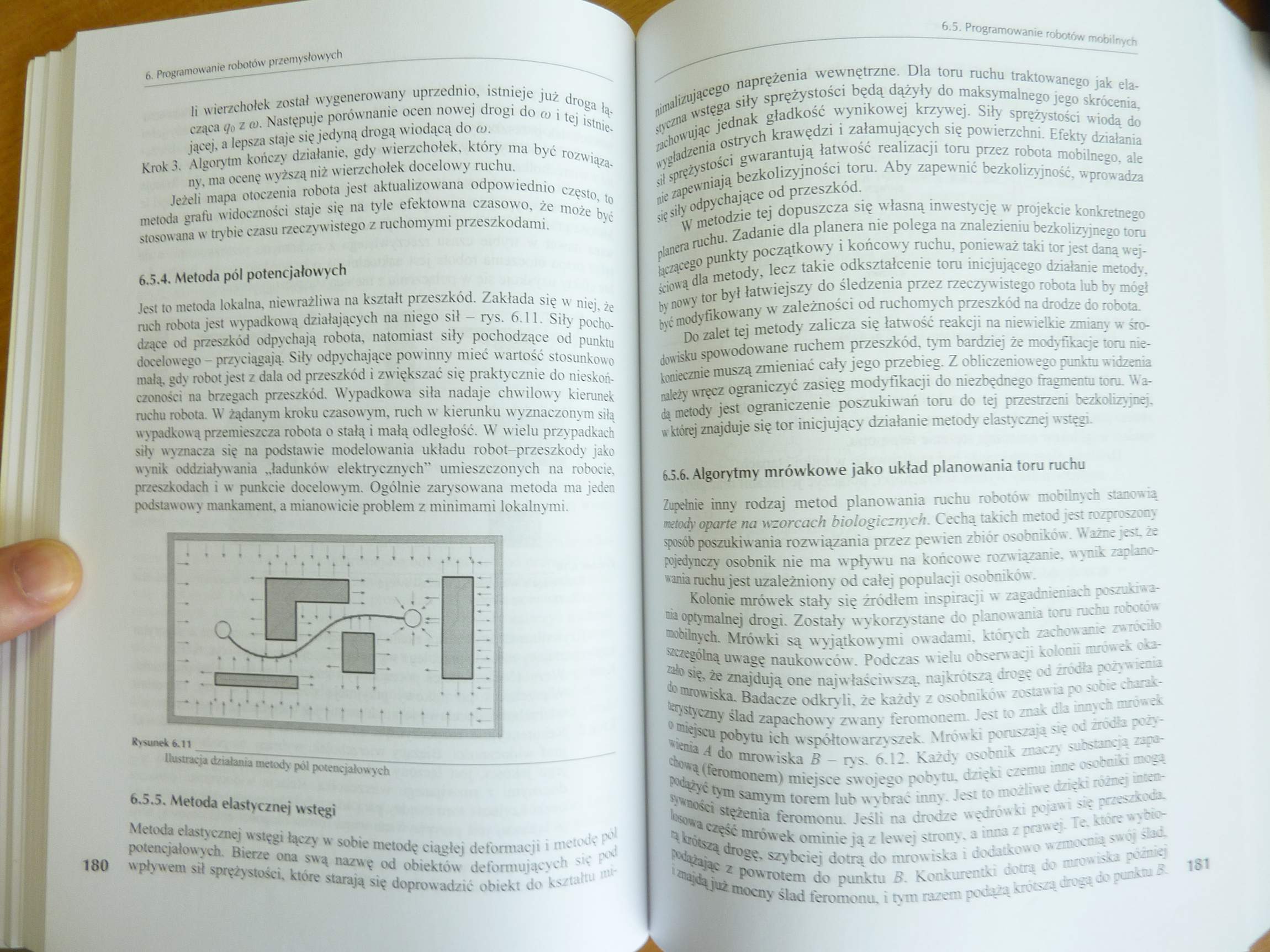
Jest to metoda lokalna, niewrażliwa na kształt przeszkód. Zakłada się w niej, że I ruch robota jest wypadkową działających na niego sił - rys. 6.11. Siły pocho- j dzące od przeszkód odpychają robota, natomiast siły pochodzące od punktu docelowego - przy ciągają. Siły odpychające powinny mieć wartość stosunkowo I małą. gdy robot jest z dala od przeszkód i zwiększać się praktycznie do nieskoń- j czoności na brzegach przeszkód. Wypadkowa siła nadaje chwilowy kierunek I ruchu robota. W żądanym kroku czasowym, ruch w kierunku wyznaczonym siłą I wypadkową przemieszcza robota o stałą i małą odległość. W wielu przypadkach siły wyznacza się na podstaw ie modelowania układu robot-przeszkody jako wynik oddziaływania „ładunków elektrycznych” umieszczonych na robocie, I przeszkodach i w punkcie docelowym. Ogólnie zarysowana metoda ma jeden podstawowy mankament, a mianowicie problem z minimami lokalnymi.
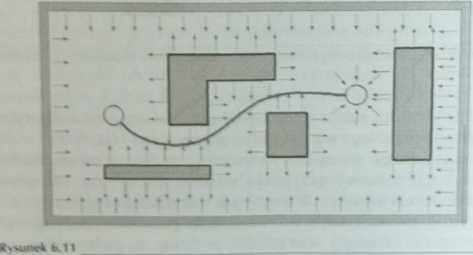
Ilustracja działania metody pól potencjałowych
6.5.5. Metoda elastycznej wstęgi
ł_*
Metoda elastycznej wstęgi łączy w sobie metodę ciągłej deformacji i mew . potencjałowych. Bierze ona swą nazwę od obiektów deformujących s* ^ wpływem sił sprężystości, które starają się doprowadzić obiekt do kszta
finalizującego naprężenia wewnętrzne. Dla toru ruchu traktowanego jak elastyczna wstęga siły sprężystości będą dążyły do maksymalnego jego skrócenia, zachowując jednak gładkość wynikowej krzywej. Siły sprężystości wiodą do wygładzenia ostrych krawędzi i załamujących się powierzchni. Efekty działania sil sprężystości gwarantują łatwość realizacji tom przez robota mobilnego, ale nic zapewniają bezkolizyjnośći tom. Aby zapewnić bezkolizyjność, wprowadza się siły odpychające od przeszkód.
W metodzie tej dopuszcza się własną inwestycję w projekcie konkretnego planem ruchu. Zadanie dla planera nie polega na znalezieniu bezkolizyjnego toru łączącego punkty początkowy i końcowy mchu, ponieważ taki tor jest daną wejściową dla metody, lecz takie odkształcenie tom inicjującego działanie metody, by nowy tor był łatwiejszy do śledzenia przez rzeczywistego robota lub by mógł być modyfikowany w zależności od ruchomych przeszkód na drodze do robota.
Do zalet tej metody zalicza się łatwość reakcji na niewielkie zmiany w środowisku spowodowane mchem przeszkód, tym bardziej że modyfikacje tom niekoniecznie muszą zmieniać cały jego przebieg. Z obliczeniowego punktu widzenia należy wręcz ograniczyć zasięg modyfikacji do niezbędnego fragmentu toru. Wadą metody jest ograniczenie poszukiwań tom do tej przestrzeni bezkolizyjnej, w której znajduje się tor inicjujący działanie metody elastycznej wstęgi
63.6. Algorytmy mrówkowe jako układ planowania toru ruchu
Zupełnie inny rodzaj metod planowania ruchu robotów mobilnych stanowią metody oparte na wzorcach biologicznych. Cechą takich metod jest rozproszony sposób poszukiw ania rozwiązania przez pewrien zbiór osobników. Ważne jest. że pojedynczy osobnik nie ma wpływu na końcowe rozw ązame. wynik zaplanowania ruchu jest uzależniony od całej populacji osobników.
Kolonie mrówek stały się źródłem inspiracji w zagadnieniach poszukiwana optymalnej drogi. Zostały wykorzystane do planowania tocu mchu robotów mobilnych. Mrówki są wyjątkowymi owadami, których zachowanie zwróciło szczególną uwagę naukowców. Podczas wielu obserwacji kołooii mrówek oka-ato ae, że znajdują one najwłaściwszą, najkrótszą drogę od źródła pożyw iaii do mrowiska. Badacze odkry li, że każdy z osobników zestawia po sobie charak-fcrystyczny ślad zapachowy zwany feromonem. Jest to znak dla innych mrówek o miejscu pobytu ich współtow arzyszek. Mrówki poruszają się od źródła pożywienia A do mrowiska B - rys. 6.12. Każdy osobnik znaczy substancja zapachową (feromonem ) miejsce swojego pobytu, dzięki czemu inoe osobniki mogą zdążyć tym samym torem lub wybrać inny. Jest to możliwe dzięki różne; maen->>*aośd stężenia feromonu. Jeśli na drodze wędrów ki pojawi s;ę przesz*. i°wwa część mrów ek ominie ją z lewej strony, a inna z prawej. Te. które wy «o ^krótszą drogę, szybciej dotrą do mrowiska i dodatkowo wzmocnią swóp i-ofejąc: z powrotem do punktu B. Konkurentki dotrą do mrowiska ^^dąjulmocny ślad feromonu, i rym razem podążą krótszą drogą do pensm
Wyszukiwarka
Podobne podstrony:
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
22382 P1080257 6. Programowanie robotów przemysłowych 125/109 = 006 (115*I23)+I03/I12/I02 = 002 w kt
29225 P1080263 6. Programowanie robotów przemysłowych tów oraz kadry w trybie wirtualnym (pierwsza f
więcej podobnych podstron