22382 P1080257
6. Programowanie robotów przemysłowych
125/109 = 006
(115*I23)+I03/I12/I02 = 002
w której będą zapisane w pamięci programu działania — rys. 6.4.
Instrukcje programu sterowania są odczytywane przez jednostkę centralną i w niej dekodowane. Instrukcje sprawdzania zmiennych wejściowych i wyj. ściowych są kierowane do jednostki logicznej, w której informacje o wzajemnym powiązaniu zmiennych, np. jako iloczynu logicznego lub sumy logicznej, powodują wykonanie odpowiednich działań.
6.3. Programowanie robotów przez nauczanie
Programowanie robota przez nauczanie (programowanie dyskretne PTP) odbywa się z panelu sterującego. Za pomocą przycisków do naprowadzania robota w wymagane położenie uruchomić ruch w płynnie sterowanych osiach w przestrzeni roboczej robota i sterować położeniem chwytaka. Przez przyciśnięcie przycisku wpisuje się do pamięci układu sterowania odpowiednią instrukcję, której częścią j są dane o pozycjach w poszczególnych osiach robota w danym punkcie. Następnie, przyciskami mchu w płynnie sterowanych osiach zajmuje się kolejną pozycję, j ponownie naciska przycisk instrukcyjny pozycji — położenie to ponownie zostaje zapamiętane, i tak postępując dalej, można zaprogramować wymagany tor ruchu robota. Między instrukcjami pozycyjnymi mogą być odpowiednio wstawiane do programu inne instrukcje. W przypadku instrukcji logicznych i wykonawczych następuje ich zatwierdzenie, natomiast instrukcje mchowe są zatwierdzone dopie- I ro po przemieszczeniu robota do zadanego punktu w jego przestrzeni roboczej. I Zaprogramowane instrukcje są wykonywane w kolejności, w jakiej zostały wczy- I tane do pamięci. Dalej przedstawiono programowanie przez nauczanie na przy- I kładzie robota KUKA KR 125.
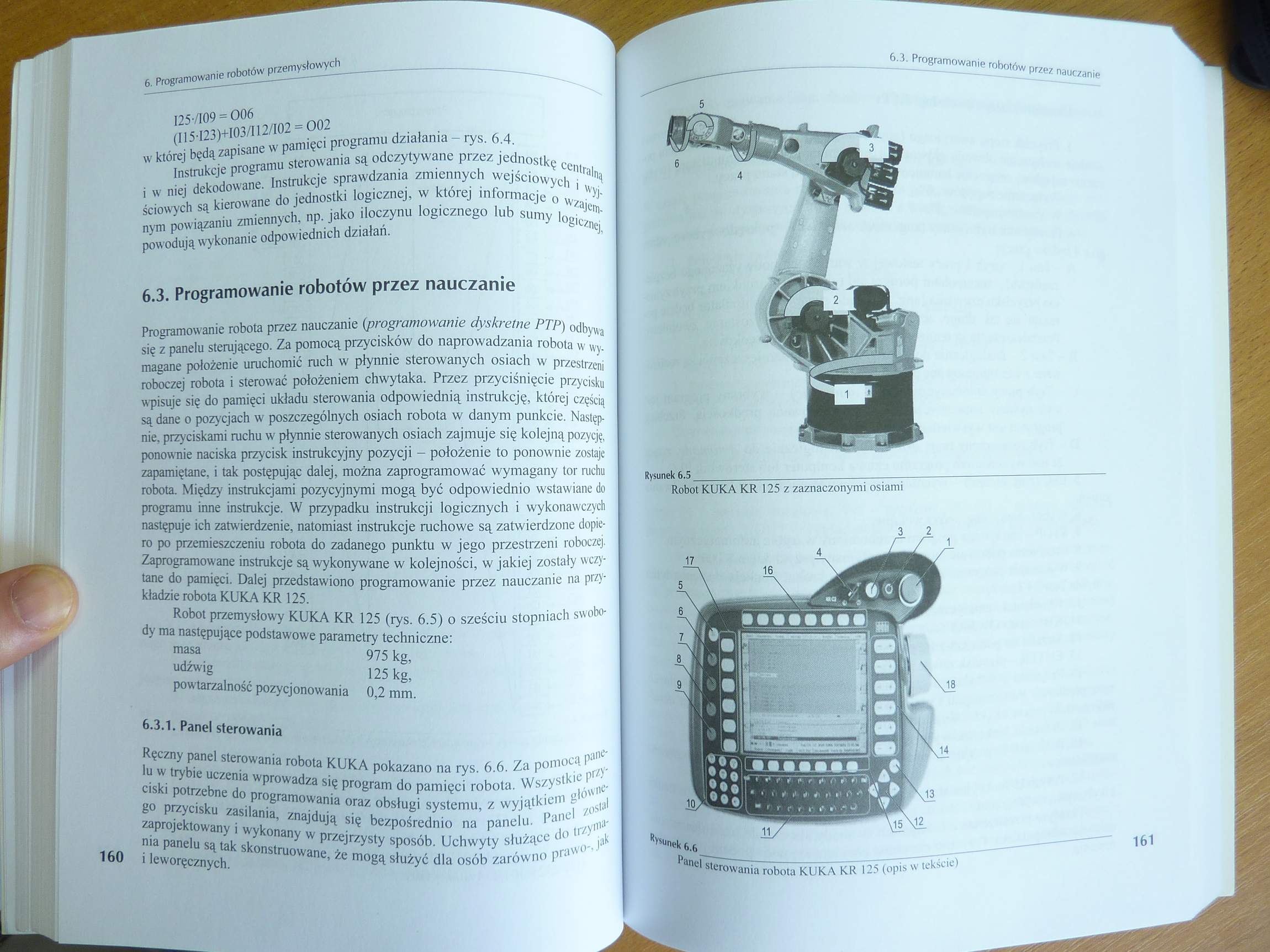
Robot przemysłowy KUKA KR 125 (rys. 6.5) o sześciu stopniach swobody ma następujące podstawowe parametry techniczne: masa 975 kg,
udźwig 125 kg,
powtarzalność pozycjonowania 0,2 mm.
6.3.1. Panel sterowania
Ręczny panel sterowania robota KUKA pokazano na rys. 6.6. Za pomocą pane* I lu w trybie uczenia wprowadza się program do pamięci robota. Wszystkie przy* I ciski potrzebne do programowania oraz obsługi systemu, z wyjątkiem główne* I go przycisku zasilania, znajdują się bezpośrednio na panelu. Panel został I zaprojektowany i wykonany w przejrzysty sposób. Uchwyty służące do tr/ym3' I nia panelu są tak skonstruowane, że mogą służyć dla osób zarówno prawo-.P I 160 i leworęcznych.

Rysunek mBBBł1 _
Robot KUKA KR 125 z zaznaczonymi osiami
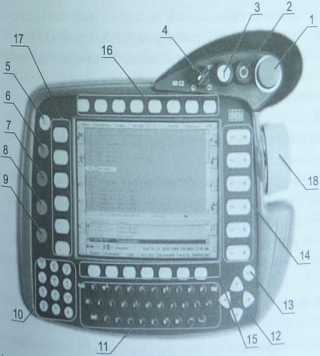
sterowania robota KUKA KR 125 (opis w tekście)
161
Wyszukiwarka
Podobne podstrony:
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
24317 P1080267 6. Programowanie robotów przemysłowych li wierzchołek został wygenerowany uprzednio,
29225 P1080263 6. Programowanie robotów przemysłowych tów oraz kadry w trybie wirtualnym (pierwsza f
więcej podobnych podstron