P1080348 (2)
11. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy
Art 100/100a Traktat EWG
Bezpieczeństwo
maszyn
Art. 118/118a Traktat EWG

■
Dyrektywa w sprawie wprowadzenia środków w celu poprawy bezpieczeństwa i zdrowia pracowników w miejscu pracy (89/EWG)
Inne dyrektywy Dyrektywa
właściwe w danym maszynowa
wypadku (98/37/WE)
■ -
Zharmonizowane normy europejskie
■
Producent
Dyrektywa dotycząca Możliwe dodatkowe minimalnych wymagań indywidualne
BHP wytyczne
Prawo krajowe
Użytkownik

Rysunek •' _______
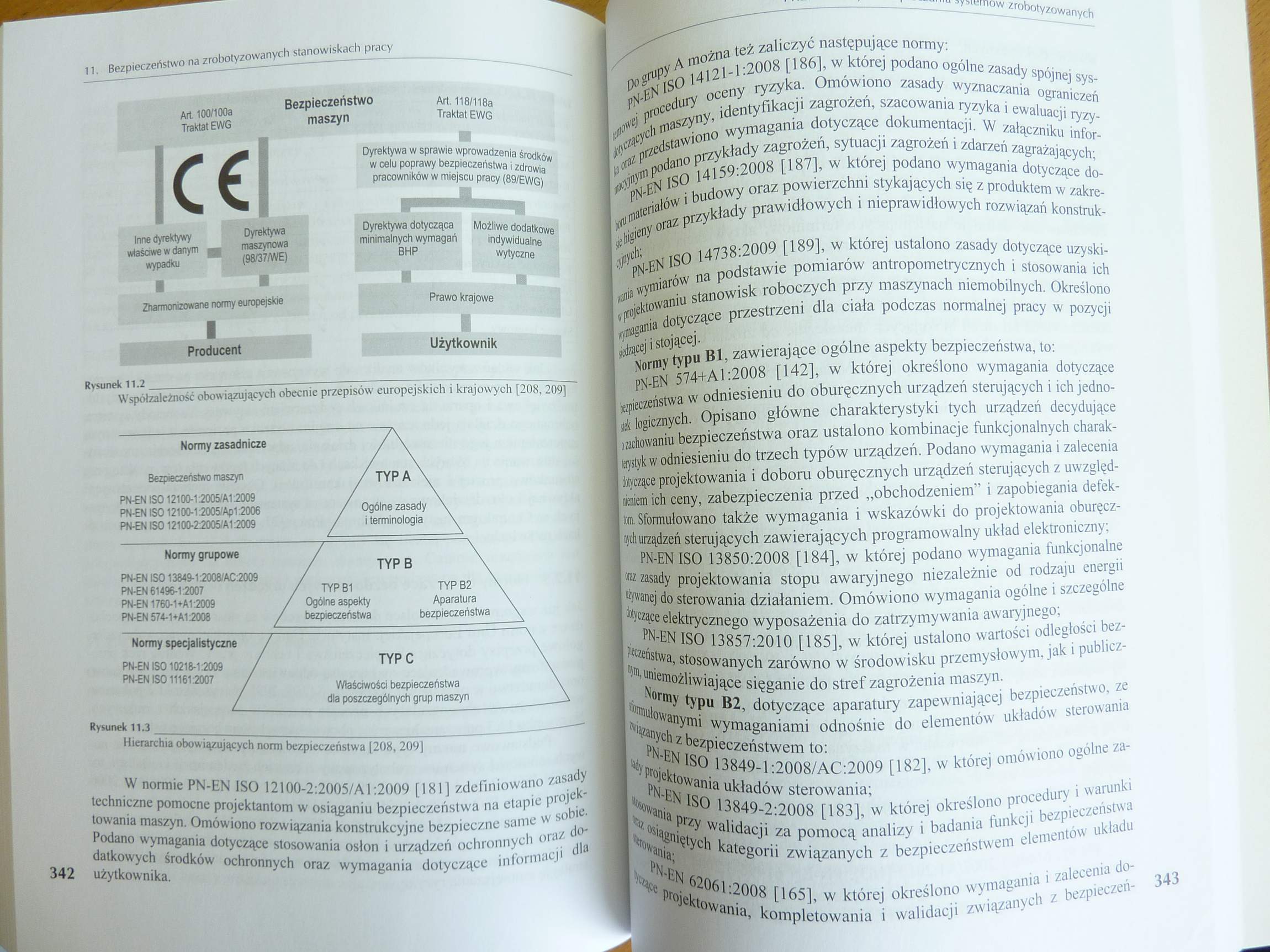
Współzależność obowiązujących obecnie przepisów europejskich i krajowych [208,209]
TYPB2 Aparatura bezpieczeństwa
Normy zasadnicze
Bezpieczeństwo maszyn
PN-EN IS012100-12005/A12009 PN-EN ISO 12100-1:20D5/Ap1:2006 PN-EN ISO 12100-22005/A12009
Normy grupowe
PN-EN IS013849-12008/AC2009 PN-EN 61496-12007 PN-EN 1760-1+A12009 PN-EN 574-1*A12008

Normy specjalistyczne
PN-EN IS010218-12009 PN-EN IS0111612007
TYP C
Właściwości bezpieczeństwa dla poszczególnych grup maszyn
Rysunek 11.3 _
Hierarchia obowiązujących norm bezpieczeństwa [208,209]
W normie PN-EN ISO 12100-2:2005/A 1:2009 [181] zdefiniowano zasady techniczne pomocne projektantom w osiąganiu bezpieczeństwa na etapie projektowania maszyn. Omówiono rozwiązania konstrukcyjne bezpieczne same w sobie. Podano wymagania dotyczące stosowania osłon i urządzeń ochronnych oraz dodatkowych środków ochronnych oraz wymagania dotyczące informacji dla użytkownika.
po grupy A można też zaliczyć następujące normy: ptf-EN ISO 14121-1:2008 [186], w której podano ogólne zasady spójnej sys-I yl procedury oceny ryzyka. Omówiono zasady wyznaczania ograniczeń I maszyny> identyfikacji zagrożeń, szacowania ryzyka i ewaluacji ryzy-I przestawi0110 wymagania dotyczące dokumentacji. W załączniku infor-l^yjnympodano przykłady zagrożeń, sytuacji zagrożeń i zdarzeń zagrażających;
pM-EN ISO 14159:2008 [187], w której podano wymagania dotyczące do-I ^materiałów i budowy oraz powierzchni stykających się z produktem w zakre-I Jjhigjefty oraz przykłady prawidłowych i nieprawidłowych rozwiązań konstruk-
I iii!
I PN-EN ISO 14738:2009 [189], w której ustalono zasady dotyczące uzyski-
I tania wymiarów na podstawie pomiarów antropometrycznych i stosowania ich
II projektowaniu stanowisk roboczych przy maszynach niemobilnych. Określono I smagania dotyczące przestrzeni dla ciała podczas normalnej pracy w pozycji I jedzącej i stojącej.
1 Normy typu BI, zawierające ogólne aspekty bezpieczeństwa, to:
I PN-EN 574+A1:2008 [142], w której określono wymagania dotyczące 1 bezpieczeństwa w odniesieniu do oburęcznych urządzeń sterujących i ich jedno-1 sek logicznych. Opisano główne charakterystyki tych urządzeń decydujące I szachowaniu bezpieczeństwa oraz ustalono kombinacje funkcjonalnych charak-I laystyk w odniesieniu do trzech typów urządzeń. Podano wymagania i zalecenia 1 dotyczące projektowania i doboru oburęcznych urządzeń sterujących z uwzględ-1 mm ich ceny, zabezpieczenia przed „obchodzeniem” i zapobiegania defek-1 Km. Sformułowano także wymagania i wskazówki do projektowania oburęcz-I sychurządzeń sterujących zawierających programowalny układ elektroniczny;
PN-EN ISO 13850:2008 [184], w której podano wymagania funkcjonalne I oraz zasady projektowania stopu awaryjnego niezależnie od rodzaju energii 1 używanej do sterowania działaniem. Omówiono wymagania ogólne i szczególne I dotyczące elektrycznego wyposażenia do zatrzymywania awaryjnego;
PN-EN ISO 13857:2010 [185], w której ustalono wartości odległości bez-I ftczeństwa, stosowanych zarówno w środowisku przemysłowym, jak i publicz-I ^uniemożliwiające sięganie do stref zagrożenia maszyn.
Normy typu B2, dotyczące aparatury zapewniającej bezpieczeństwo, ze i l!ormulowanymi wymaganiami odnośnie do elementów układów sterowania I Wiązanych z bezpieczeństwem to:
PN-EN ISO 13849-1:2008/AC:2009 [182], w której omówiono ogólne za-I ^projektowania układów sterowania;
| PN-EN ISO 13849-2:2008 [183], w której określono procedury i warunki Rwania przy walidacji za pomocą analizy i badania funkcji bezpieczeństwa Ciągniętych kategorii związanych z bezpieczeństwem elementów układu I Hcr°wania;
I 62061:2008 [165], w której określono wymagania i zalecenia do-
Projektowania, kompletowania i walidacji związanych z bezpieczeń-
343
Wyszukiwarka
Podobne podstrony:
48389 P1080346 (2) 11. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy 11.2.2. Zabezpieczenia s
P1080345 (2) IT. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy Tablica 11.2. Przyczyny wykona
16158 P1080345 (2) IT. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy Tablica 11.2. Przyczyny
HPIM0907 11. Bezpieczeństwo na zrobotyzowanyeh stanowiskach pracy Maty naciskowe Zbudowane są z twor
HPIM0906 1I. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy 11.2.2. Zabezpieczenia sprzętowe p
86566 P1080347 (2) 1. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy pominąć konstrukcją klawi
P1080350 (2) 1. Bezpieczeństwo na zrobotyzowanych stanowiskach pracy zrobotyzowanego, jego użytkowan
więcej podobnych podstron