P1080364
13. Zastosowania robotów przemysłowych
- urządzenia spawalniczego — agregatu spawalniczego wraz z niezbędnym wyposażeniem, będącego źródłem prądu w procesie spawania;
- podajnika i magazynu drutu:
- pozycjonera - określającego, w zależności od wymagań procesu, w jaki sposób spajane elementy będą zmieniać swoje ustawienie względem robota podczas spawania;
- uchwytu montażowego ustalającego wzajemne ustawienie spajanych elementów oraz ich zamocowanie, od czego w dużym stopniu zależy dokładność gotowego wyrobu; należy rozważać możliwość automatyzacji mocowania elementów i odbierania części;
- wyposażenia dodatkowego - interfejsów komunikacyjnych, sterowników nadrzędnych i pomocniczych;
urządzeń zabezpieczających. diagnostycznych, zapewniających kontrolę jakości itp.;
- interfejsu operatora (HMI).
Przy kładowy schemat blokowy stanowiska spawalniczego pokazano ns rys. 13.7, a jego wygląd na rys. 13.8.
Po2yqooer
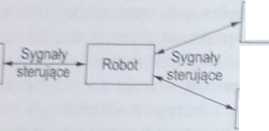
Źródło prądu
Podajnik drutu
Schemat blokowy stanowiska spawalniczego
Rysunek 13.7
Proces spawania polega na realizacji elementów.*
- ustalenia i zamocowania w uchwytach pozycjonera spajanych czę* Ści,
- ustawienia pozycji początkowej elektrody i drutu elektrodow ego,
- zapoczątkowania ruchu roboczego elektrody i kontynuowania właściwego procesu spawania.
- zakończenia procesu, wyłączenia zasilania elektrody,
- kontroli wykonanej spoiny, ewentualnie korekty parametrów spawania,
- zwolnienia uchwytów' mocujących,
- zdjęcia zespawanego podzespołu z urządzenia mocującego.
Podczas robotyzacji procesu spawania należy dokonać właściwego podbiału podanych operacji i czynności między człow i ek a -operat ora a urządzenia transportowo-manipulacyjnc [ 131J.
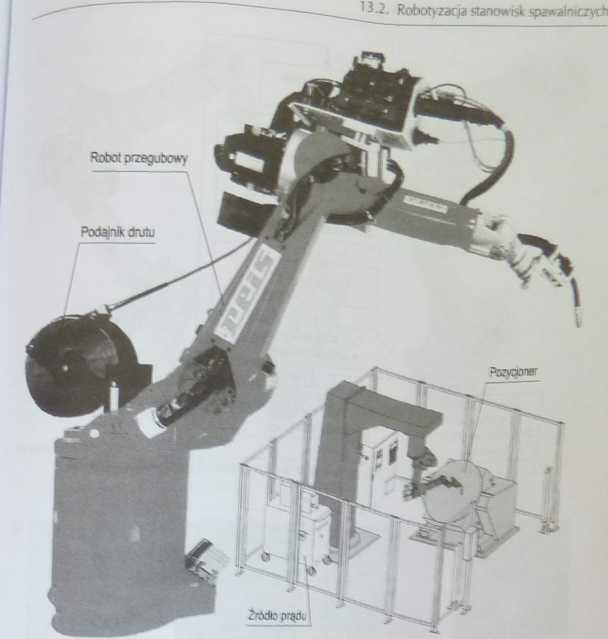
Rysunek 118_
Robot spawalniczy oraz przykładowe stanowisko spawalnicze -[274]
Na rysunku 13.9 podano algorytm działania stanowiska spawalniczego.
Stanowiska spawalnicze powinny składać się z jak największej liczby elementów' standardowych - komponentów-, modułów, co znacznie skraca czas projektowania i wdrażania z jednoczesnym zwiększeniem pewności eksploatacyjnej. Elementami standardowymi wyposażenia są; robot, źródło prądu i niektóre komponenty urządzeń pozvcjonującivmanipulacyjnych (pceycjoneiów), np. jednostki mchu obrotowego, wkłady napędowe i sterowania. Konfiguracja całego stanowiska, jak również często pozyejoner om oprzyrządowanie mocujące musaą być specjalnie zaprojektowane dla konkretnego podzespołu i przyjętego dla mego poziomu technicznego m>boryżow-anej technologii spawania.
Roboty do celów spawalniczych to najczęściej roboty przegubowa o sreśau stopniach swobod>. .łąko przykład można podać roboty pokazane na 373
Wyszukiwarka
Podobne podstrony:
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron