Scan10003 (5)
130 K. Jankowski
Część nieruchomą czujnika stanowi cylinder, w którym na rdzeniu (3) jest umieszczona cewka (4). Wyprowadzenia cewki są podłączone do wtyczki wyjściowej. Rdzeń oraz cewka zamknięte są w nierozbieralnej obudowie (2).
Czujnik jest zamontowany lak, że wycięcia w części ruchomej oddziałują na obwód magnetyczny czujnika. Strumień magnetyczny pochodzący od magnesu trwałego przenikając zwoje cewki powoduje indukowanie się w nich siły elektromotorycznej (SEM). Warunkiem indukowania się SEM jest zmiana wartości strumienia magnetycznego w czasie. Największe wielkości zmian strumienia magnetycznego występują wtedy, gdy wycięcia części ruchomej obejmują całą ; szerokość rdzenia części nieruchomej. Szerokość rdzenia równa się szerokości i wycięcia części ruchomej, aby możliwe było ścisłe określenie kąta zapłonu. Kąt j położenia walu korbowego określa się na podstawie sygnału z czujnika, mierząc j czas pomiędzy amplitudami sygnału. W rzeczywistych warunkach taki sposób, określania kąta położenia wału korbowego obarczony jest pewnym błędem. Centralka sterująca wyznacza bowiem kąt położenia walu korbowego na podstawie pomiaru czasu z poprzedniego cyklu. W przypadku, gdy w dwóch następujących] po sobie cyklach prędkość silnika będzie różna nastąpi błąd identyfikacji położenia walu silnika. Błąd jest tym większy, im większa jest różnica prędkości obrotowej! silnika w dwóch sąsiednich cyklach. Błąd ten można zmniejszyć stosując kolos z dużą ilością nacięć, gdzie pomiaru między sąsiednimi amplitudami możną! dokonywać częściej. Znaczne różnice w prędkości obrotowej występują na biegu! jałowym, w fazie przyspieszania i w fazie wytracania prędkości przez silnik,! W tych stanach pracy silnika prawidłowa ocena kątowego położenia walu korbo-f wego jest bardzo ważna, gdyż zależy od niej kąt zapłonu, od którego z kolei zależylj dynamika silnika. Drugą informacją zawartą w sygnale z czujnika położenia wałuj korbowego jest informacja o aktualnej prędkości obrotowej silnika. Prędkość! obrotowa silnika wpływa na kąt wyprzedzenia zapłonu, częstotliwość wtrysku oraż§ poziom otwarcia zaworu w kanale obejściowym przepustnicy.
Czujnik fotoelektryczny nazywany jest również czujnikiem optoelektronicznym lub folooptycznym. Czujniki te budowane są jako refleksyjne (odbiciowe) lub' z przesłoną. W samochodach stosowane są te drugie.
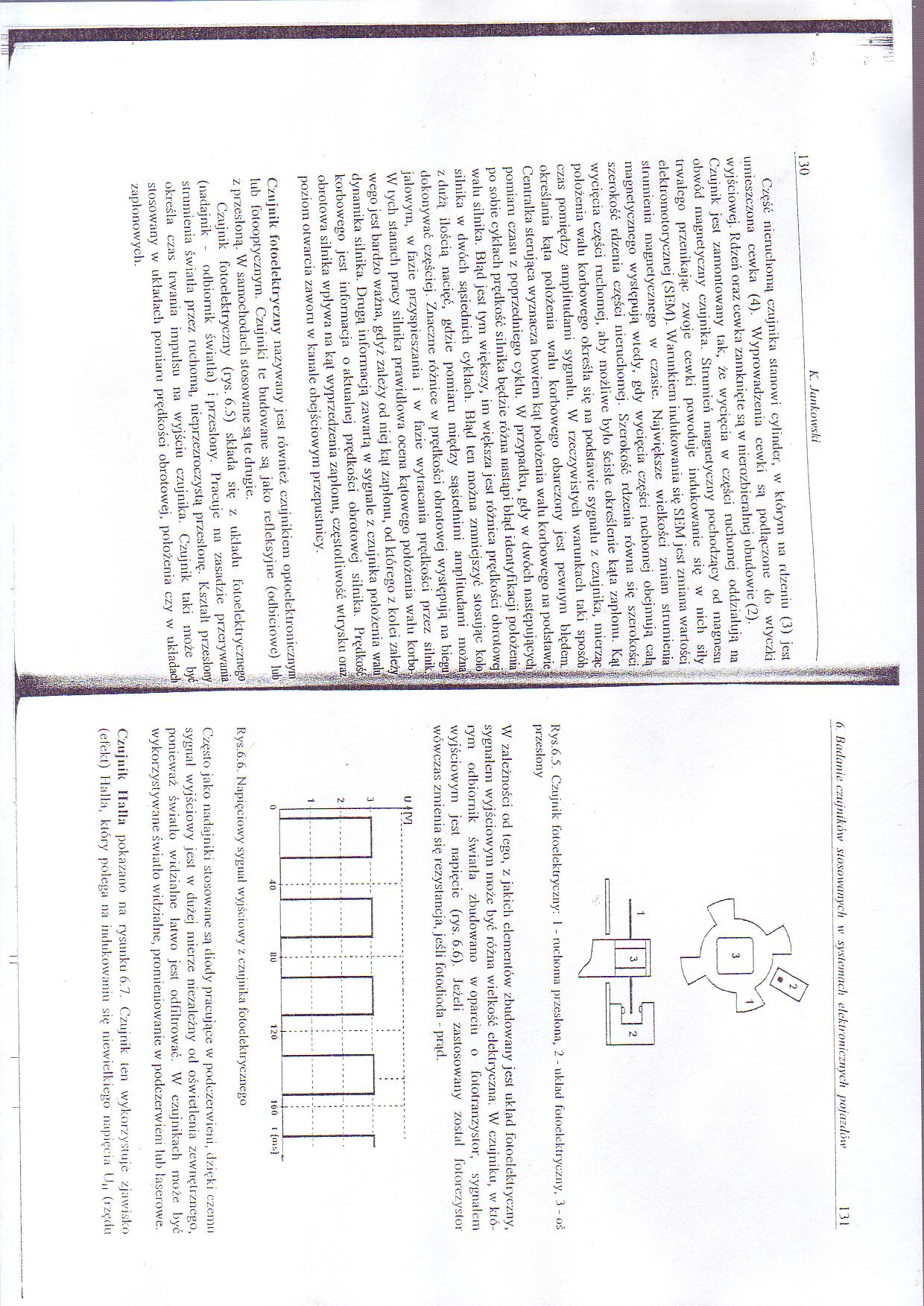
Czujnik fotoelektryczny (rys. 6.5) składa się z układu fotoelektrycznego (nadajnik - odbiornik światła) i przesłony. Pracuje na zasadzie przerywania strumienia światła przez ruchomą, nieprzezroczystą przesłonę. Kształt przesłony? określa czas trwania impulsu na wyjściu czujnika. Czujnik taki może być stosowany w układach pomiaru prędkości obrotowej, położenia czy w układach zapłonowych.
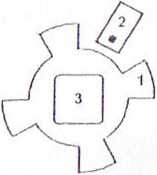
Rys.6.5. Czujnik (bioelektryczny: I - ruchoma przesłona, 2-układ foloeleklryczny, 3 - oś przesłony
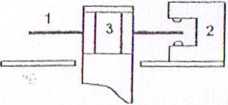
W zależności od tego, z jakich elementów zbudowany jest układ fotoelektryczny, sygnałem wyjściowym może być różna wielkość elektryczna. W czujniku, w którym odbiornik światła zbudowano w oparciu o fototranzystor, sygnałem wyjściowym jest napięcie (rys. 6.6). Jeżeli zastosowany został fotorczystor wówczas zmienia się rezystancja, jeśli fotodioda - prąd.
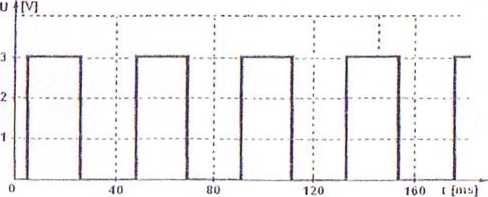
Rys.6.6. Napięciowy sygnał wyjściowy z czujnika fotoelektrycznego
Często jako nadajniki stosowane są diody pracujące w podczerwieni, dzięki czemu sygnał wyjściowy jest w dużej mierze niezależny od oświetlenia zewnętrznego, ponieważ światło widzialne łatwo jest odfiltrować. W czujnikach może być wykorzystywane światło widzialne, promieniowanie w podczerwieni lub laserowe.
Czujnik Maila pokazano na rysunku 6.7. Czujnik ten wykorzystuje zjawisko (efekt) Maila, który polega na indukowaniu się niewielkiego napięcia lJ(l (rzędu
Wyszukiwarka
Podobne podstrony:
1.2 Poszukiwania wodoru Większą część gazu w Galaktyce stanowi atomowy wodór (HI). Wodór jest
BEDĘ MĄDRY JAK SOWA DLA 5 6 LATKÓW CZEŚĆ 1 27 Połącz małe litery z koszykami, na których jest narys
35906 Scan10007 (4) 138 K. Jankowski Rys.6.15. Stanowisko do badań czujników: 1 - stelaż stanowiska,
Scan10001 (3) 126 K. Jankowski 6. KADANIE CZUJNIKÓW STOSOWANYCH W SYSTEMACH ELEKTRONICZNYCH POJAZDÓW
Scan10002 (3) 128 K. Jankowski Rys 6.1. Czujnik ciśnienia bezwzględnego MAR: 1 podłączenie powietrza
80735 Scan10011 (6) 6 K. Jankowski Rys.6.23. Czujnik położenia przepustnicy Przełącznik wskaźnika na
Scan10001 (3) 126 K. Jankowski 6. KADANIE CZUJNIKÓW STOSOWANYCH W SYSTEMACH ELEKTRONICZNYCH POJAZDÓW
47447 Scan10001 (3) 126 K. Jankowski 6. KADANIE CZUJNIKÓW STOSOWANYCH W SYSTEMACH ELEKTRONICZNYCH PO
Scan10002 (3) 128 K. Jankowski Rys 6.1. Czujnik ciśnienia bezwzględnego MAR: 1 podłączenie powietrza
Scan10002 (3) 128 K. Jankowski Rys 6.1. Czujnik ciśnienia bezwzględnego MAR: 1 podłączenie powietrza
Scan10008 (7) MO K Jankowski 6.5.3. Wykonanie pomiarów 6.5.3.1. Badanie czujnika ciśnienia bezwzględ
37814 Scan10005 (4) 1 34 K. Jankowski Często ważne, z punktu widzenia funkcjonowania pojazdu, czujni
więcej podobnych podstron