strona (196)

średniej częstotliwości. Te drugie mają cechy korzystniejsze, ponieważ uzyskany skurcz jest nieco silniejszy i nie wywołuje podrażnień elektrolitowych w tkankach. Ponadto prądy średniej częstotliwości głębiej penetrują tkanki i mięśnie niż prądy małej częstotliwości.
Należy podkreślić regułę wynikającą z przedstawionych dotychczas wywodów. Parametry impulsu (czas trwania impulsu i przerwy między impulsami) dostosowuje się do pobudliwości mięśnia. Parametry modułów (czas trwania modułów i przerw międzymodułowych oraz ogólną liczbę modułów) dostosowuje się do męczliwości mięśnia.
Regulowanie parametrów impulsów średniej częstotliwości w aparatach leczniczych jest rozwiązywane w różnorodny sposób. W niektórych przerwy między impulsami podstawowymi są regulowane niezależnie od równie dowolnie regulowanych impulsów. W innych aparatach regulacja jest ograniczona, np. zawsze tp = timp, lub przerw w ogóle nie ma (tp = 0). W tym ostatnim przypadku czas impulsu jest równy okresowi, a wypełnienie wynosi 100%.
10
0
-10
mA

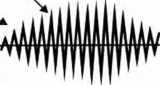
timp= 0.33 ms 'mod (serii)
T mod
tpmm •
Rytm impulsów (nośny)
tp = 0, a zatem T = timp = 0,33 ms,
f impulsów = 3 000 Hz
Rytm modułów (grup, serii) T = * mod + * pmm = 5 m f modułów = 100 Hz
|
Moduły sinusoidalne |
Napięcie zmienne, jednokierunkowe | |||
|
m 10 i |
A |
..................................../........ |
^mod |
\ |
|
rWVWWWVYYVvvvt | ||||
|
0 - |
1,0 |
0,6 11,0 |
15 ms | |
|
Ą |
............... * mod* Serii) ........ |
tpmm | ||
|
10 |
Moduły prostokątne | |||
|
mmmm_. | ||||
-to
\ X
Napięcie przemienne, dwukierunkowe Moduły sinusoidalne \
Ryc. 4.20. Przykłady modułów prostokątnych i sinusoidalnych, jedno- i dwukierunkowych, składających się z impulsów średniej częstotliwości
196
Wyszukiwarka
Podobne podstrony:
ustanawiać umowa pomiędzy stronami sprzedaży. Szczególnie często te wyjątki będą miały znaczenie prz
radzenia sobie z przyszłymi sytuacjami konfliktowymi. Dominacja i tłumienie te metody mają dwie wspó
i teatru, pomoc mieszkaniowa itp. Te drugie, choc mają charakter niezwiązany bezpośrednio z pieniądz
Strona0154 154 równej częstości wymuszenia a>, a więc zachodzi zjawisko rezonansu. Należy wytłumi
Strona0156 156 Częstości te wynoszą 2 _ 1
IMGV35 26 daA, podali. legend, kronik, nowel wtrąconych, traktatów etc. Wszystkie te gatunki mąją cz
scandjvutmp49�01 66 te władze tak są od siebie oddzielue, iż przedmioty jednej bywają częstokroć prz
określić ich przynależność do pewnego gatunku - genus. Te drugie można określić ze względu na ich ce
Laboratorium Metrologii i Zamienności Ćwiczenie 4 w średnicówkach często nie mają wskazówki
Laboratorium Metrologii i Zamienności Ćwiczenie 4 w średnicówkach często nie mają wskazówki
skanuj0036 (11) • i it-U*
więcej podobnych podstron