str016 (3)
2.3.1. Soloktywnn Dostępność
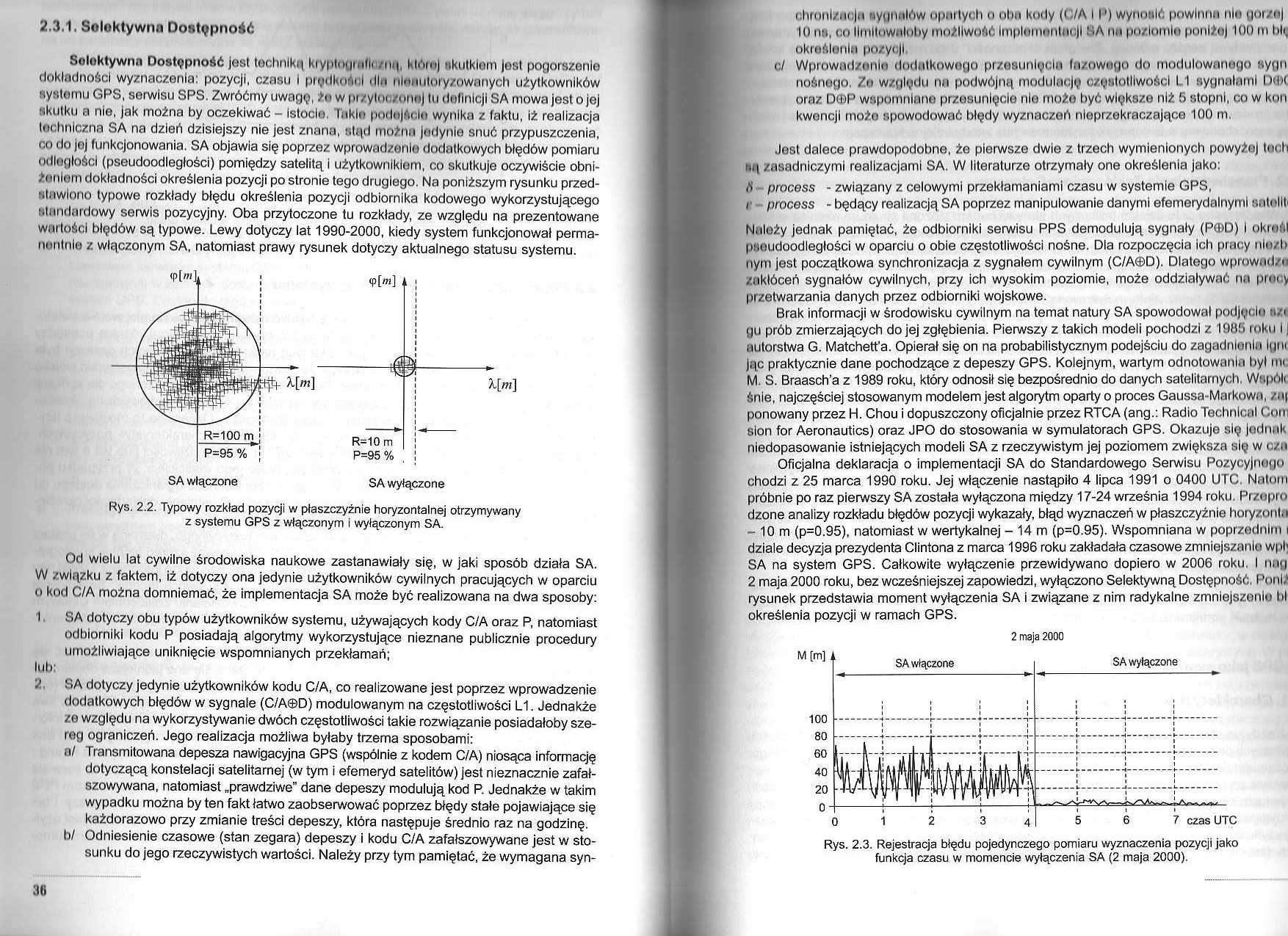
Soloktywnn Dostępność jes! techniką kryplnuiiifli /nu, Klr*n• ij ukutklem jost pogorszenie dokładności wyznaczenia: pozycji, czasu I prędki itiol illn nlnriuloiyzowanych użytkowników systemu GPS, serwisu SPS. Zwróćmy uwagę, żn w pi/yli h /onoj tu definicji SA mowa jest o jej skutku a nie, jak można by oczekiwać - Istocie; Inklo podti|fu:lii wynika z faktu, iż realizacja techniczna SA na dzień dzisiejszy nie jest znana, stąd możnn |edynla snuć przypuszczenia, co do jej funkcjonowania. SA objawia się poprzez wprowadzenie dodatkowych błędów pomiaru odległości (pseudoodległości) pomiędzy satelitą i użytkownikiem, co skutkuje oczywiście obniżeniem dokładności określenia pozycji po stronie tego drugiego. Na poniższym rysunku przedstawiono typowe rozkłady błędu określenia pozycji odbiornika kodowego wykorzystującego standardowy serwis pozycyjny. Oba przytoczone tu rozkłady, ze względu na prezentowane wartości błędów są typowe. Lewy dotyczy lat 1990-2000, kiedy system funkcjonował permanentnie z włączonym SA, natomiast prawy rysunek dotyczy aktualnego statusu systemu.
Rys. 2.2. Typowy rozkład pozycji w płaszczyźnie horyzontalnej otrzymywany z systemu GPS z włączonym i wyłączonym SA.
Od wielu lat cywilne środowiska naukowe zastanawiały się, w jaki sposób działa SA.
W związku z faktem, iż dotyczy ona jedynie użytkowników cywilnych pracujących w oparciu
0 kod C/A można domniemać, że implementacja SA może być realizowana na dwa sposoby:
1 SA dotyczy obu typów użytkowników systemu, używających kody C/A oraz P, natomiast odbiorniki kodu P posiadają algorytmy wykorzystujące nieznane publicznie procedury umożliwiające uniknięcie wspomnianych przekłamań;
lub:
SA dotyczy jedynie użytkowników kodu C/A, co realizowane jest poprzez wprowadzenie dodatkowych błędów w sygnale (C/A9D) modulowanym na częstotliwości L1. Jednakże zo względu na wykorzystywanie dwóch częstotliwości takie rozwiązanie posiadałoby szereg ograniczeń. Jego realizacja możliwa byłaby trzema sposobami: u/ Transmitowana depesza nawigacyjna GPS (wspólnie z kodem C/A) niosąca informację dotyczącą konstelacji satelitarnej (w tym i efemeryd satelitów) jest nieznacznie zafałszowywana, natomiast „prawdziwe” dane depeszy modulują kod P. Jednakże w takim wypadku można by ten fakt łatwo zaobserwować poprzez błędy stałe pojawiające się każdorazowo przy zmianie treści depeszy, która następuje średnio raz na godzinę, b/ Odniesienie czasowe (stan zegara) depeszy i kodu C/A zafałszowywane jest w stosunku do jego rzeczywistych wartości. Należy przy tym pamiętać, że wymagana syn-
i.hronl/wt:|n '»yun«l6w opartych n obu kody ((:/A 11') wynrmlć powinno nlo gurztij to nti, co llmltownłnby możliwość Implomnnlncjl MA mh pozlomln poniżej 100 ni ł>l«. okroślonln pozyojl.
c,l Wprowad/nnlo dodatkowego przesunięcia Inzowngo do modulowanego sygn nośnego /o względu na podwójno modulację częstotliwości L1 sygnałami D(1)( oraz DffiP wspomniane przesunięcie nie może być większo niż 5 stopni, co w kon kwencji możo spowodować błędy wyznaczeń nioprzekraczające 100 m.
Jest dalece prawdopodobne, że pierwsze dwie z trzech wymienionych powyżo| tooli mi zasadniczymi realizacjami SA. W literaturze otrzymały one określenia jako:
I) process - związany z celowymi przekłamaniami czasu w systemie GPS.
1 process - będący realizacją SA poprzez manipulowanie danymi efemerydalnymi satollt
Nałoży jednak pamiętać, że odbiorniki serwisu PPS demodulują sygnały (PffiD) I określ psoudoodległości w oparciu o obie częstotliwości nośne. Dla rozpoczęcia ich pracy nlo.-h nym jest początkowa synchronizacja z sygnałem cywilnym (C/A0D). Dlatego wprowadza zakłóceń sygnałów cywilnych, przy ich wysokim poziomie, może oddziaływa* na pro* v przetwarzania danych przez odbiorniki wojskowe.
Brak informacji w środowisku cywilnym na temat natury SA spowodował podjęciu uzi gu prób zmierzających do jej zgłębienia. Pierwszy z takich modeli pochodzi z I98!> roku i autorstwa G. Matchetfa. Opierał się on na probabilistycznym podejściu do zagadnienia Igui Jąc praktycznie dane pochodzące z depeszy GPS. Kolejnym, wartym odnotowania był m< M. S. Braasch’a z 1989 roku, który odnosił się bezpośrednio do danych satelitarnych. Współ* śnie, najczęściej stosowanym modelem jest algorytm oparty o proces Gaussa-Markown, z, t| ponowany przez H. Chou i dopuszczony oficjalnie przez RTCA (ang.: Radio Technlcal (łom sion for Aeronautics) oraz JPO do stosowania w symulatorach GPS. Okazuje się jednak niedopasowanie istniejących modeli SA z rzeczywistym jej poziomem zwiększa się w cza
Oficjalna deklaracja o implementacji SA do Standardowego Serwisu Pozycyjnn*|<> chodzi z 25 marca 1990 roku. Jej włączenie nastąpiło 4 lipca 1991 o 0400 UTC. Natom próbnie po raz pierwszy SA została wyłączona między 17-24 września 1994 roku. I'rzepu* dzone analizy rozkładu błędów pozycji wykazały, błąd wyznaczeń w płaszczyźnie horyzontu 10 m (p=0.95), natomiast w wertykalnej - 14 m (p=0.95). Wspomniana w poprzednim i dziale decyzja prezydenta Clintona z marca 1996 roku zakładała czasowe zmniejszanie wpl* SA na system GPS. Całkowite wyłączenie przewidywano dopiero w 2006 roku. I ring
2 maja 2000 roku, bez wcześniejszej zapowiedzi, wyłączono Selektywną Dostępność. Poniż rysunek przedstawia moment wyłączenia SA i związane z nim radykalne zmniejszeniu bl określenia pozycji w ramach GPS.
2 maja 2000

Rys. 2.3. Rejestracja błędu pojedynczego pomiaru wyznaczenia pozycji jako funkcja czasu w momencie wyłączenia SA (2 maja 2000).
Wyszukiwarka
Podobne podstrony:
Szybki dostępdo informacji technicznych KYB dzięki filmom instruktażowym! Dział techniczny KYB
Nowe skanowanie 20130610124024 00006 Zadanie 31. Na stanowisku pracy, pomimo zastosowania dostępnych
larsen0979 36. Zagadnienia prawne 979 dostępne metody i techniki terapeutyczne, ze szczególnym uwzgl
Polonista polimedialny: wykorzysta wszelkie dostępne środki techniczne, by zainicjować medialna
16176 s260 260 Pn/naj l.inux Program xbanner posiada niemal 80 opcji dostępnych w wierszu poleceń, a
PB250070 Technika chwilowej izolacji Czym jes technika swobodn ekspresji plastyczn sz
techniki internetowe i?zy?nych cw 2 W ^t/?S7Ł5 (>&<*)^ Jj$ ^rvTdO YY (
Technik ekonomista 341 [02]■n fFTi rrn CLLAJL 200 Przykład 6 Faktura VAT - częściowo wykonana
wytrzymałośćmateriałów tom I Wydawnictwa Naukowo-Techniczne fflsPPrenEft i nu
74 PRZEGLĄD TECHNICZNY. 1907. nu, byłaby platyna. Miedź i jej stopy topią się w stosunkowo dość
CO TO JEST ENERGETYKA? to dział nauki, techniki oraz przemysłu zajmuje się przetwarzaniem dostępnych
podstawy wiedzy o?ukacji i por zaw stronar 73 bodnym dostępie do nowoczesnej techniki metodę tę moż
więcej podobnych podstron