Untitled Scanned 51 (3)
I
I
CM.M„
J EJ
54 2-30 5
— (3-8-4)—-— (2-4 + 2)+— 3 -30-12 6 2
(-540-100 + 225-1440) =
[2( —4- 30 + 8 • 120)+ 30- 8 —120- 4]
:-- 1 855.
EJ
Spełniona jest także równość (13.17).
Podstawiając obliczone współczynniki do układu równań otrzymamy.
381,3Xi +144,0X2 + 360,0A3 —54,0 XI.—4 798,0 = 0;
144,0Xi + 72,0^2-126,0X3-18,0^-2106,0=0;
- 360,0 Xi -126,0X2 + 408,3 X3 + 66,5 X4 + 4 401,0=0 ;
-54,0X2- 18,0X2+ 66,5X3 + 13,0X4 + 648,0=0.
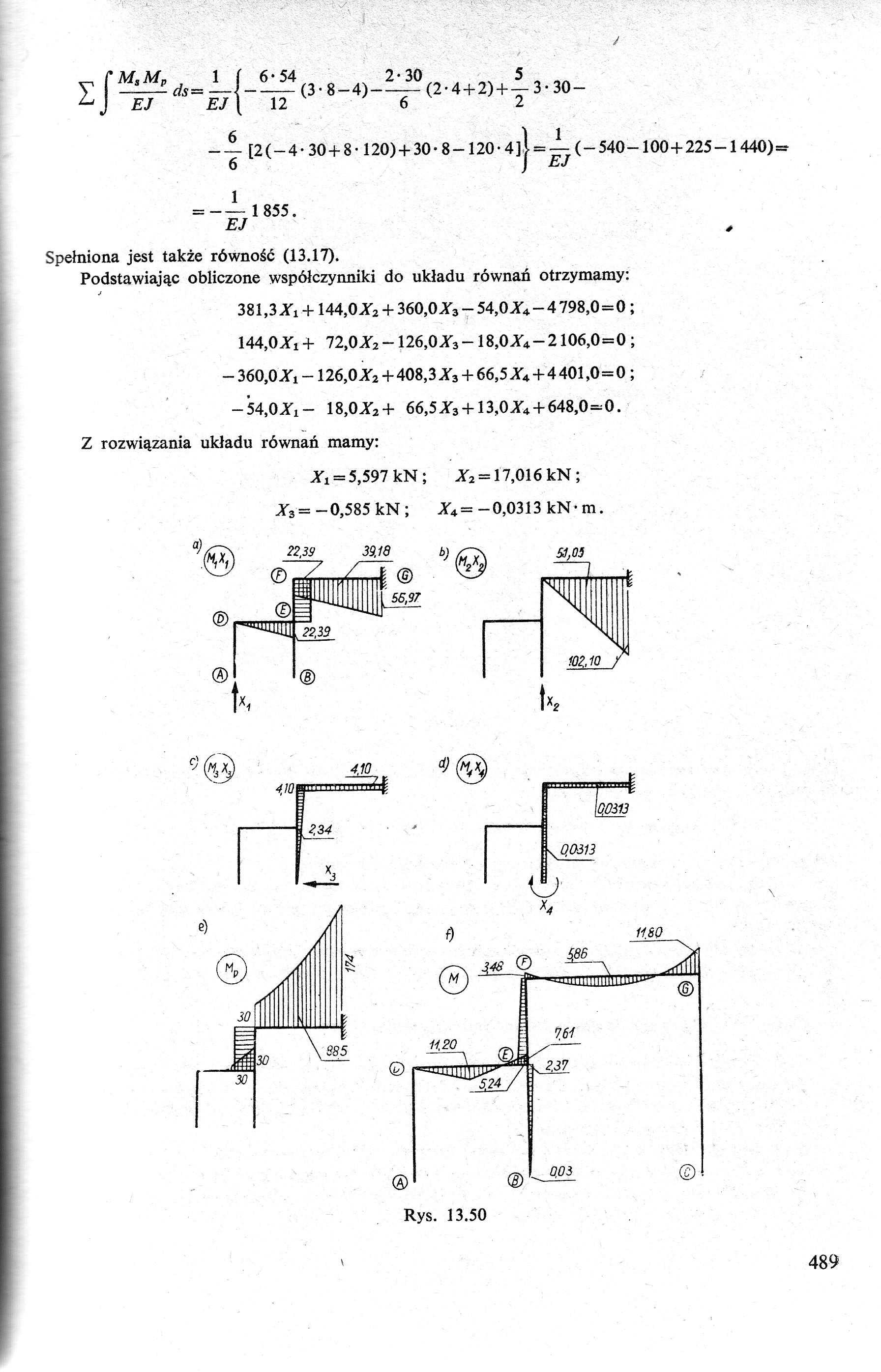
Z rozwiązania układu równań mamy:
Xi = 5,597 kN; X3=-0,585 kN;
X2 = 17,016 kN; X4=-0,0313 kN-m.
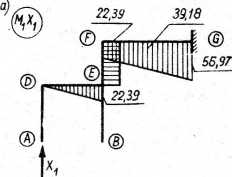
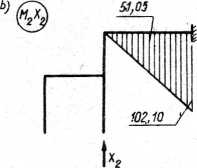

Rys. 13.50
11.80
lis © ©H
©
11.20 ^ Ki
761
237
I 0,03
©
489
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 51 (3) I I CM.M„ J EJ 54 2-30 5 — (3-8-4)—
70463 Untitled Scanned 51 (2) 54 GEOMETRIA ANALITV 3.18 Dane są wektory ii =
Untitled Scanned 02 (6) Cm <2 C c^t UpUciV, *1* & fuK CjCWs, &n
Untitled Scanned 51 I c1.12 Ćwiczenie umiejętności ortograficznych Wyrazy z utratą dźwięczności
81086 Untitled Scanned 51 - 102 - są nieefektywne, zarówno ze względu na trudności wynikające ze sto
Untitled Scanned 51 (4) / wzrokiem. Cofamy się wszędzie tam, gdzie w dążeniu do pełni syntezy przesz
28498 Untitled Scanned 51 I c1.12 Ćwiczenie umiejętności ortograficznych Wyrazy z utratą dźwięcznośc
Untitled Scanned 30 SzendvicskagylóAnyag & 1 fćlig kinyilt vćnuszkagyló * 2 db
12428 Untitled Scanned 01 (28) ?otvad 30% .sitcU i iwie ■6 , h%% ziewiskcj. -toSSef &% *c .zvue
22827 Untitled Scanned 30 - 60 - Do realizacji danego zadania sterowania nogą być zastosowane różne
Untitled Scanned 02 d) (Ąim 1 sacmtó Oftunoiy^ a- ŁJ -- d?-OM >4,0.- ł,54 <tib«z -- g~„- t =
Untitled Scanned 04 2 c. Prąd przemienny o częstotliwości 5 kH. 51. Który z podanych poniżej wariant
Untitled Scanned 10 dwyactydtd opyw &ti ^ 30^ JM 9) 7 > X UvCpO o r v1 >
Untitled Scanned 11 2 u--: BU CM • nt***t**r (* 7*2 •
Untitled Scanned 11 kuMó.u; CM/fa ^>ixlv ću ho* ,0.uK xti6cij*cęu<vi tif ux<5(/7cutufc&
więcej podobnych podstron