P1080218
4
Wprowadzenie do kinematyki robotów
Kinematyka to nauka zajmująca się opisem ruchu bez uwzględnienia sił wywołujących ten ruch. W ramach kinematyki manipulatorów bada się: zmiany położenia, prędkości i przyspieszenia ruchu.
4.1. Elementy struktury kinematycznej robotów przemysłowych
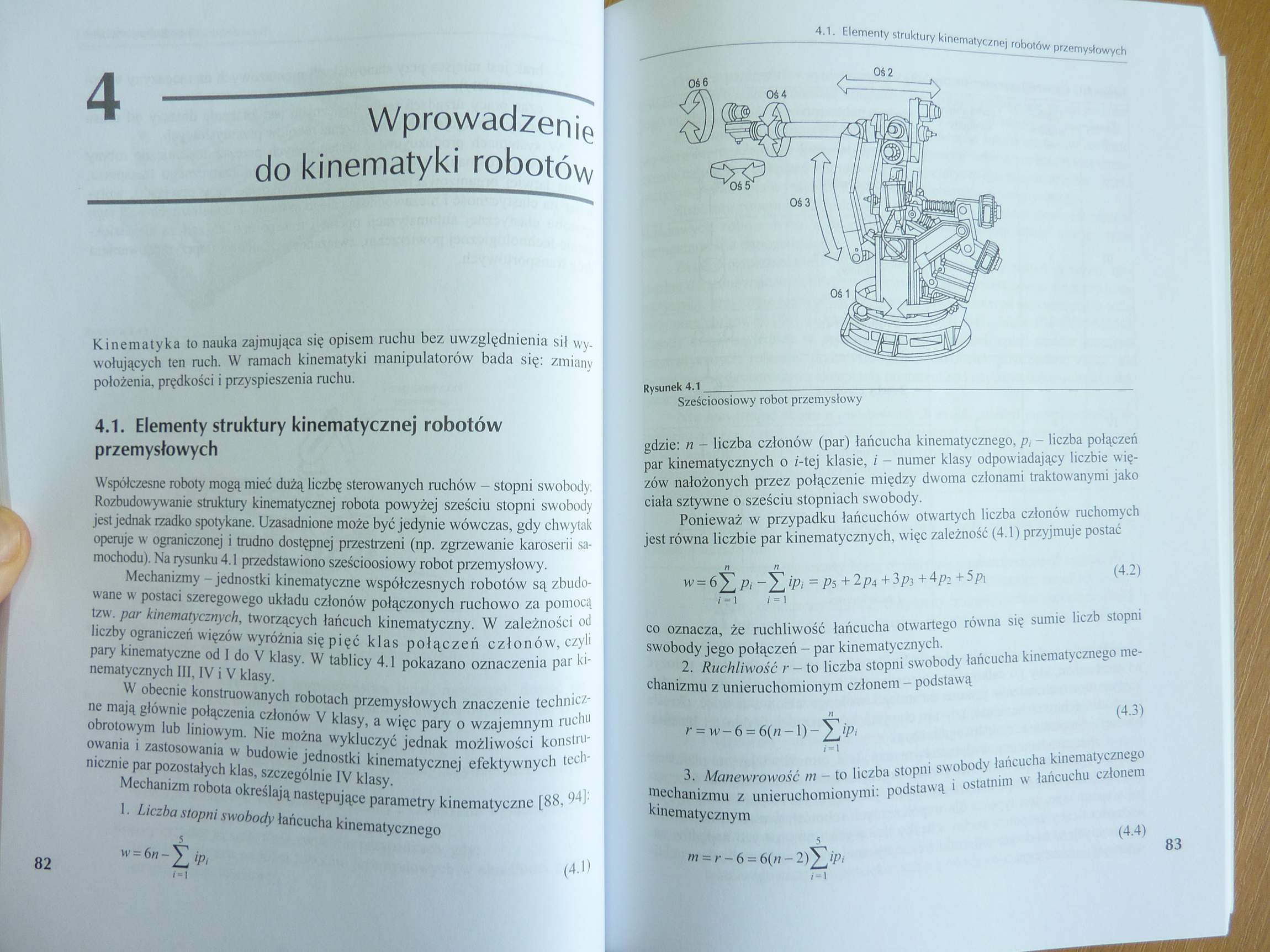
Współczesne roboty mogą mieć dużą liczbę sterowanych ruchów - stopni swobody. Rozbudowywanie struktury kinematycznej robota powyżej sześciu stopni swobody jest jednak rzadko spotykane. Uzasadnione może być jedynie wówczas, gdy chwytak operuje w ograniczonej i trudno dostępnej przestrzeni (np. zgrzewanie karoserii samochodu). Na rysunku 4.1 przedstawiono sześcioosiowy robot przemysłowy.
Mechanizmy - jednostki kinematyczne współczesnych robotów są zbudowane w postaci szeregowego układu członów połączonych ruchowo za pomocą tzw. par kinematycznych, tworzących łańcuch kinematyczny. W zależności od liczby ograniczeń więzów wyróżnia się pięć klas połączeń członów, czyli pary kinematyczne od I do V klasy. W tablicy 4.1 pokazano oznaczenia par kinematycznych III, IV i V klasy.
W obecnie konstruowanych robotach przemysłowych znaczenie techniczne mają głównie połączenia członów V klasy, a więc pary o wzajemnym ruchu obrotowym lub liniowym. Nie można wykluczyć jednak możliwości konstruowania i zastosowania w budowie jednostki kinematycznej efektywnych technicznie par pozostałych klas, szczególnie IV klasy.
Mechanizm robota określają następujące parametry kinematyczne [88,94]:
1. Liczba stopni swobody łańcucha kinematycznego
s

(4.1)
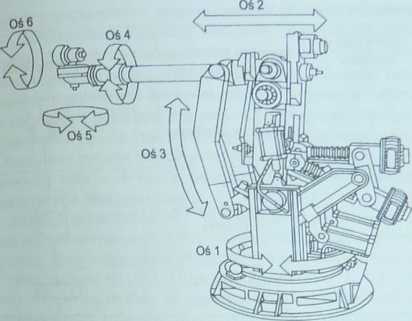
Rysunek 4.1^Hg£j_
Sześcioosiowy robot przemysłowy
gdzie: n - liczba członów (par) łańcucha kinematycznego, p, - liczba połączeń par kinematycznych o i-tej klasie, i — numer klasy odpowiadający liczbie więzów nałożonych przez połączenie między dwoma członami traktowanymi jako ciała sztywne o sześciu stopniach swobody.
Ponieważ w przypadku łańcuchów otwartych liczba członów ruchomych jest równa liczbie par kinematycznych, więc zależność (4.1) przyjmuje postać
n n
w = 6^ pt —ipt - ps + 2p4 + 3 p3 + 4p2 + 5 pi (4.2)
co oznacza, że ruchliwość łańcucha otwartego równa się sumie liczb stopni swobody jego połączeń — par kinematycznych.
2. Ruchliwość r — to liczba stopni swobody łańcucha kinematycznego mechanizmu z unieruchomionym członem — podstawą
r — w—6 = 6 (w —
(4.3)
i=i
3. Manewrowość m — to liczba stopni swobody łańcucha kinematycznego mechanizmu z unieruchomionymi: podstawą i ostatnim w łańcuchu członem kinematycznym
m — r — 6 = 6(n
‘Pi
(4.4)
83
Wyszukiwarka
Podobne podstrony:
HPIM0788 rnatyki robotr Kinematyka to nauka zajmująca się opisem mchu bez uwzględnienia sił ® wojują
Analiza kinematyczna mechanizmów-definicje Kinematyka - dział mechaniki zajmujący się opisem ruchu c
DSC01983 2 Wykład 1. Wprowadzenie do ekonomii Ekonomia to nauka zajmująca się badaniem podmiotów gos
prof. UEK Halina Piekarz Ergonomia - jest to nauka zajmująca się dostosowaniem techniki do organizmu
Slajd4 (42) Fizjologia człowieka jest to nauka zajmująca się procesami życiowymi organizmu ludzkiego
bm (10pkt) Uzupełnij zdania. to nauka zajmująca się procesami gospodarowania todz
Ekonomia - to nauka zajmująca się działalnością gospodarczą ludzi. Bada w jaki sposób podejmują oni
Webusability Użyteczność (ang. usability) to nauka zajmująca się ergonomią interaktywnych urządzeń
ENERGOMETRIA (KALORYMETRIA) To nauka zajmująca się badaniem wpływu czynników fizjologicznych i
Wprowadzenie • Informatyka to nauka zajmująca się zbieraniem, przechowywaniem
Ruch (wielkości opisujące ruch) Kinematyka zajmuje się opisem ruchu różnych ciał bez wnikania w przy
Statystyka (1)• Statystyka to nauka zajmująca się zbieraniem, badaniem i
4. Syntaktyka. Jest to nauka zajmująca się badaniem związków, jakie zachodzą między znakami wewnątrz
Podstawowe pojęcia i metody statystyki. Statystyka - jest to nauka zajmująca się metodami badania
więcej podobnych podstron