P1080219
4. Wprowadzenie do kinematyki robotów
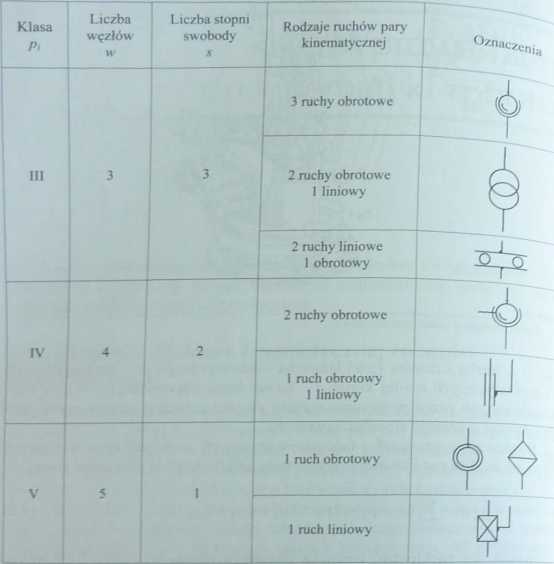
Tablica 4.1. Oznaczenia par kinematycznych 111 +V klasy
Drugi z tych parametrów określa liczbę więzów, jakie należałoby nałożyć na mechanizm, aby go całkowicie unieruchomić, trzeci podobnie, ale po dodatkowym unieruchomieniu jeszcze ostatniego wolnego członu, a więc określa swobodę ruchu mechanizmu, gdy np. chwytak lub narzędzie jednostki kinematycznej zajmuje ściśle określone położenie.
Człon mechanizmu z dołączonym napędem, umożliwiającym realizację określonego ruchu pary kinematycznej, tworzy zespół ruchu jednostki kinematycznej. Zastosowanie połączeń ruchowych tylko o jednym stopniu swobody, jak już wspomniano, jest typowe dla współczesnych robotów, prowadzi do równoważności liczby zespołów ruchu — liczby liniowych i obrotowych napędów zastosowanych w budowie jednostki kinematycznej maszyny oraz liczby ruchliwości jej mechanizmu.
Oprócz parametrów syntetycznych, jakimi są liczby ruchliwości i manew-rowości, mechanizm jednostki kinematycznej robota opisuje się przez podanie jego ogólnych właściwości geometrycznych, czyli tzw. struktury kinematycznej.
Pod pojęciem struktury kinematycznej łańcucha lub mechanizmu rozumie się określenie schematu kinematycznego w postaci szkicu, na którym są oznaczenia członów i połączeń wg tabl. 4.1 lub syntetycznego zapisu struktury kinematycznej oraz opis wymiarowy (geometrię) schematu kinematycznego.
Struktura robota przemysłowego dotyczy więc rozmieszczenia elementów składowych robota wraz z przedstawieniem możliwości relacji między tymi elementami dla danego układu.
Zasady oznaczania osi współrzędnych, kierunków i zespołów ruchu, niezbędne do jednoznaczności zapisu szkicowego bądź syntetycznego struktury kinematycznej, przyjmuje się według międzynarodowych zaleceń stosowanych w technice obrabiarkowej [80] (EIA-RS 267A, ISO R 641, także PN-93/M-55251). Zasady te nie są jednak w pełni adekwatne do potrzeb opisu struktur jednostek kinematycznych robotów przemysłowych i jakkolwiek powszechnie znane, nie cieszą się międzynarodową akceptacją producentów i użytkowników techniki robo-tyzacyjnej [94].
Nie rezygnując zatem z podstawowych zasad, zaleceń i norm techniki obrabiarkowej (co czyni pewna część producentów robotów w swych wydawnictwach katalogowych), celowe było stworzenie zbioru zasad określania osi współrzędnych i kierunku ruchu, oznaczania zespołów ruchu i zapisu struktury jednostek kinematycznych robotów.
1. Możliwości manipulacyjne członów robota określa się, stosując trzy układy odniesienia'.
— regionalny, oznaczany literą R, dotyczący przemieszczania ramion robota, a więc realizacji podstawowych dla robota działań manipulacyjnych,
— lokalny, oznaczany literą/., dotyczący przemieszczania efektora (chwytaka lub narzędzia), czyli działań orientowania i chwytania manipulowanego obiektu,
— globalny, oznaczany literą G, dotyczący przemieszczania robota względem stanowiska roboczego.
2. Regionalny odcinek łańcucha kinematycznego mechanizmu, występujący (z definicji) w każdym robocie, traktuje się jako definicyjną część mechanizmu.
3. Podstawowy układ osi współrzędnych jest układem prostokątnym, pra-woskrętnym, w którym osie X i Z leżą w płaszczyźnie pionowej, przechodzącej przez ostatni zespół ruchu regionalnego odcinka łańcucha kinematycznego w jego normalnym (katalogowym) położeniu, przy czym oś A'jest równoległa do płaszczyzny podstawy robota.
4. Za dodatni przyjmuje się zwrot ruchu:
— w przypadku ruchów liniowych (AT, Y,Z) na zewnątrz mechanizmu, w wyniku czego następuje powiększenie odpowiedniego wymiaru mechanizmu, 85
Wyszukiwarka
Podobne podstrony:
88615 P1080235 4. Wprowadzenie do kinematyki robotów Korzystając z tych oznaczeń, można określić prę
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron