P1080237
5. Sterowanie robotów przemysłowych
Rysunek aSŁ';.- ____l.. _
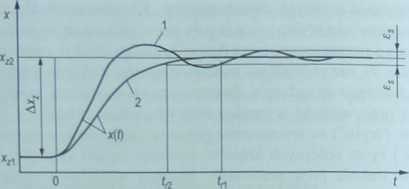
Regulacja położenia w zadaniu przestawiania; / - z przeregulowaniem, 2 - bez przereeu-lowania, Ax. - skok zadanej wartości położenia, x{t) - zmiany położenia, tru tr2 - czasy regulacji, e, - odchyłka statyczna regulacji położenia
Ze względu na współpracę maszyny z innymi urządzeniami technologicznymi przestawienia te powinny być realizowane aperiodycznie bez przeregulo-wania (przebieg 2 na rys. 5.1). Dla zespołów ruchu maszyn manipulacyjnych zamiast czasu regulacji tr określa się zwykle dopuszczalną największą prędkość ruchu Un« = ima* • Jedynie przy zadawaniu skoordynowanych przemieszczeń kilku zespołów jednostki kinematycznej ustala się czas regulacji, tzw. czas przejścia, który już jednak podczas programowania jest przeliczany na wartości prędkości poszczególnych zespołów, zapewniających np. prostoliniowość toru.
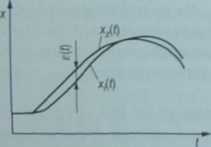
Nadążanie jest charakterystyczne dla zespołów ruchu jednostek kinematycznych maszyn o sterowaniu ciągłym. Występuje także w tych zadaniach, w których jest konieczna do uzyskania korelacja (synchronizacja) poszczególnych ruchów składowych w celu realizacji przemieszczenia po określonej linii ciągłej (na ogół prostej) między parami kolejnych punktów toru. W odróżnieniu od przestawiania nadążanie cechuje się ciągłymi zmianami zadanej pozycji. Jego parametrami są: dopuszczalna wartość odchyłki dynamicznej £j oraz dopuszczalna prędkość zmian wartości zadanej. Oznacza to, że dla dowolnych dopuszczalnych zmian wartości zadanych różnica e(t) między położeniem istniejącym x,{t) a zadanym xjt) (rys. 5.2) nie może co do wartości bezwzględnej przekraczać wartości ą.
Rysunek 5.2 _ _ “,*/
Regulacja położenia w przypadku nadążania; x//) - położenie zadane. Xi(t) - położenie istniejące, e(t) - odchyłka regulacji
Ponieważ robot wykonuje ruchy w kilku osiach połączonych ze sobą, uzyskanie zadanej drogi w przestrzeni wymaga, aby robot przemieszczał swoje ramiona przez różne położenia przegubów. Dla robota o sześciu stopniach swobody każdy punkt toru jest opisany za pomocą sześciu wartości współrzędnych. Każda wartość odpowiada położeniu jednego przegubu. Jeżeli punkt w przestrzeni w programie robota jest położeniem efektom, to istnieje zwykle więcej niż jeden układ ramion robota umożliwiający osiągnięcie tego punktu. Przykładem są dwa różne położenia robota umożliwiające osiągnięcie tego samego zadanego punktu (rys. 3.9).
Biorąc to pod uwagę, należy stwierdzić, że specyfikacja punktu w przestrzeni nie definiuje jednoznacznie współrzędnych przegubów robota. Odwrotnie jednak, specyfikacja współrzędnych przegubów robota określa tylko jeden punkt w przestrzeni, który odpowiada temu zespołowi wartości współrzędnych.
Z tego względu sterowanie robota (koordynację ruchów napędów) można określić jako sekwencję współrzędnych (położeń) przegubów, której efektem jest droga w przestrzeni.
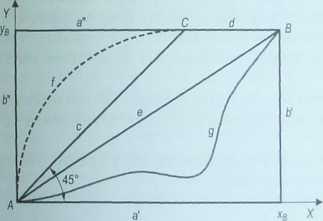
Zatrzymajmy się nad problemem określenia sekwencji punktów w przestrzeni. Dfo uproszczenia weźmy pod uwagę robota w układzie kartezjańskim, sterowanego w dwóch osiach i o dwóch punktach możliwych do zaprogramowania na każdej osi. Na rysunku 5.3 pokazano możliwe do osiągnięcia punkty w prostokątnej przestrzeni roboczej robota.
Rysunek 5.3_____
Przestrzeń robocza robota kartezjańskiego o dwóch osiach i dwóch zaprogramowanych punktach na każdej z osi (oznaczenia «+g omówiono w tekście)
Pojawia się pytanie: jak zaprogramować wybraną drogę między punktami d i fi? Są tu różne możliwości:
1. W danym czasie ruch będzie się odbywać tylko w jednej osi i efektor będzie przemieszczał się po bokach a', b' prostokąta przez punkt .r*
2. W danym czasie ruch będzie się odbywać tylko w jednej osi i efektor kędzićprzemieszczał się po bokach b’\ a" prostokąta przez punktys.
121
Wyszukiwarka
Podobne podstrony:
P1080241 5. Sterowanie robotów przemysłowych Rysunek S.4_____ Klasyfikacja układów sterowania robotó
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
76806 P1080214 3, Minlmv.i robotów przemysłowych Rysunek 3J7 . Robot o strukturze
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
83218 P1080279 7. Napędy robotów przemysłowych Rysunek 7.14 _ Schemat blokowy serwonapędu tyrystorow
55128 P1080239 5. Sterowanie robotów przemysłowych hiperbola, elipsa). Przeznaczona jest szczególnie
więcej podobnych podstron