P1080312
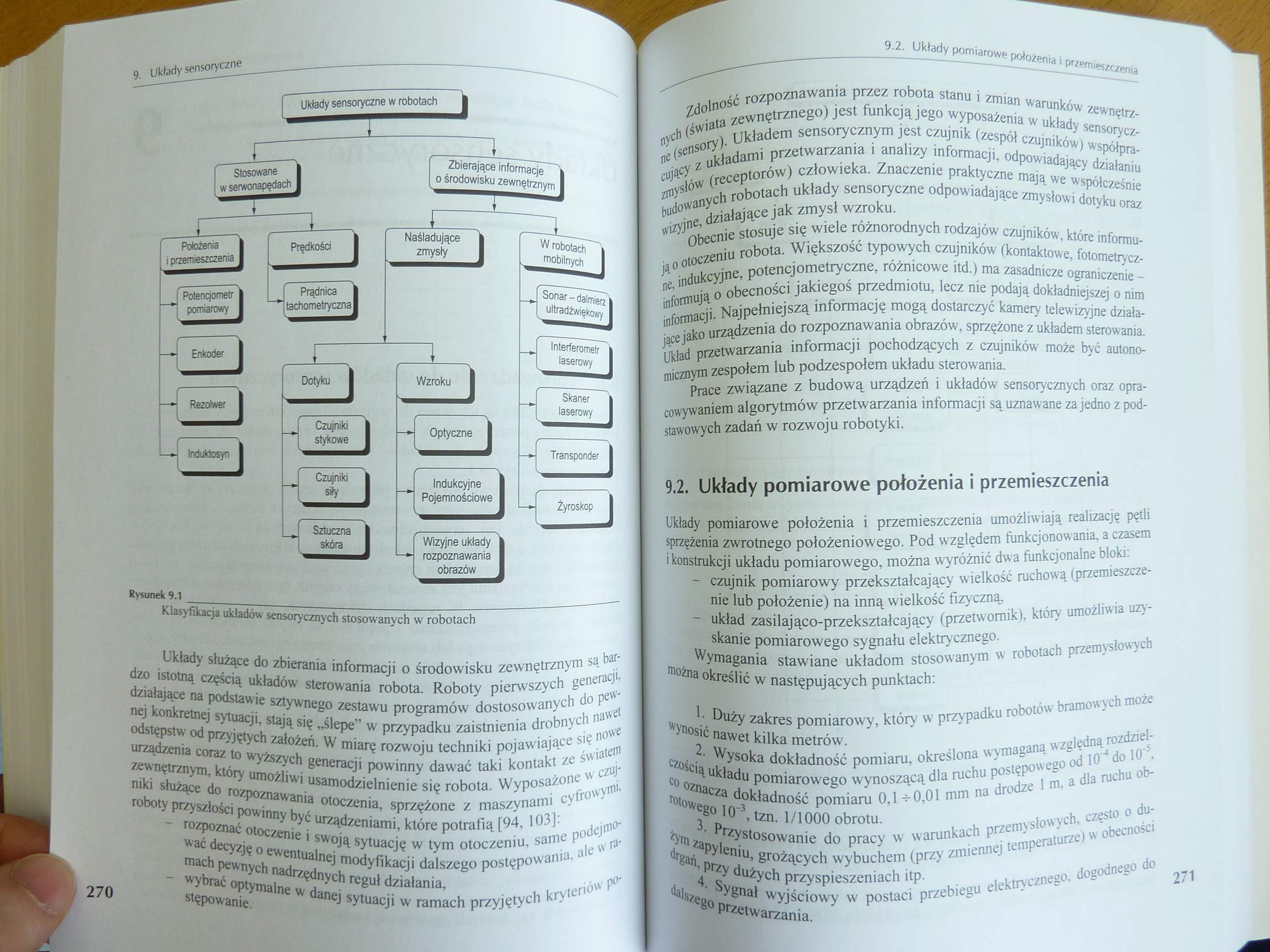

Układy sensoryczne w robotach
|
( śtói ranę I |
Zbierające informacje |
|
1 w serwa apędacy |
o środowisku zewnętrznym 1 |
|
Prędkości j |
Naśladujące k zmysły |
|
J Prądnica | 1 tachometryczna I |

I Sonar-dalmierz\
1 ultradźwiękowy I
Interferometr
laserowy
Indukcyjne
Pojemnościowe
)
Żyroskop
Wizyjne układy rozpoznawania obrazów
Rysunek 9.1 _
Klasyfikacja układów sensorycznych stosowanych w robotach
Układy służące do zbierania informacji o środowisku zewnętrznym są bar- I dzo istotną częścią układów sterowania robota. Roboty pierwszych generacji, I działające na podstawie sztywnego zestawu programów dostosowanych do pew-1 nej konkretnej sytuacji, stają się „ślepe” w przypadku zaistnienia drobnych nawet I odstępstw od przyjętych założeń. W miarę rozwoju techniki pojawiające się nowe I urządzenia coraz to wyższych generacji powinny dawać taki kontakt ze światem I zewnętrznym, który umożliwi usamodzielnienie się robota. Wyposażone w czuj-1 niki służące do rozpoznawania otoczenia, sprzężone z maszynami cyfrowymi, I roboty przyszłości powinny być urządzeniami, które potrafią [94,103]:
- rozpoznać otoczenie i swoją sytuację w tym otoczeniu, same podejmo-1 wać decyzję o ewentualnej modyfikacji dalszego postępowania, ale w ramach pewnych nadrzędnych reguł działania,
- wybrać optymalne w danej sytuacji w ramach przyjętych kryteriów postępowanie.
Zdolność rozpoznawania przez robota stanu i zmian warunków zewnętrznych (świata zewnętrznego) jest funkcją jego wyposażenia w układy sensoryczne (sensory). Układem sensorycznym jest czujnik (zespół czujników) współpracujący z układami przetwarzania i analizy informacji, odpowiadający działaniu zmysłów (receptorów) człowieka. Znaczenie praktyczne mają we współcześnie budowanych robotach układy sensoryczne odpowiadające zmysłowi dotyku oraz wizyjne, działające jak zmysł wzroku.
Obecnie stosuje się wiele różnorodnych rodzajów czujników, które informu-I ją o otoczeniu robota. Większość typowych czujników (kontaktowe, fotometrycz-ne, indukcyjne, potencjometryczne, różnicowe itd.) ma zasadnicze ograniczenie -informują o obecności jakiegoś przedmiotu, lecz nie podają dokładniejszej o nim informacji. Najpełniejszą informację mogą dostarczyć kamery telewizyjne działające jako urządzenia do rozpoznawania obrazów, sprzężone z układem sterowania.

micznym zespołem lub podzespołem układu sterowania.
Prace związane z budową urządzeń i układów sensorycznych oraz opracowywaniem algorytmów przetwarzania informacji są uznawane za jedno z podstawowych zadań w rozwoju robotyki.
9.2. Układy pomiarowe położenia i przemieszczenia
Układy pomiarowe położenia i przemieszczenia umożliwiają realizację pętli sprzężenia zwrotnego położeniowego. Pod względem funkcjonowania, a czasem i konstrukcji układu pomiarowego, można wyróżnić dwa funkcjonalne bloki:
- czujnik pomiarowy przekształcający wielkość ruchową (przemieszczenie lub położenie) na inną wielkość fizyczną,
- układ zasilająco-przekształcający (przetwornik), który umożliwia uzyskanie pomiarowego sygnału elektrycznego.
Wymagania stawiane układom stosowanym w robotach przemysłowych można określić w następujących punktach:
271
Wyszukiwarka
Podobne podstrony:
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
30031 P1080313 9. Układy sensoryczne Rysunek^__ Klasyfikacja stosowanych w robotach przemysłowych uk
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
P1080324 9. Układy sensoryczne - odległości między charakterystycznymi punktami ob
więcej podobnych podstron