P1080360
13, Zastosowania robotów przemysłowych siębiorstwach wymaga spełnienia warunków tzw. oszczędnej produkcji (air Leon Productioń).
13.1.1. Wprowadzenie do projektowania zrobotyzowanych systemów wytwarzania
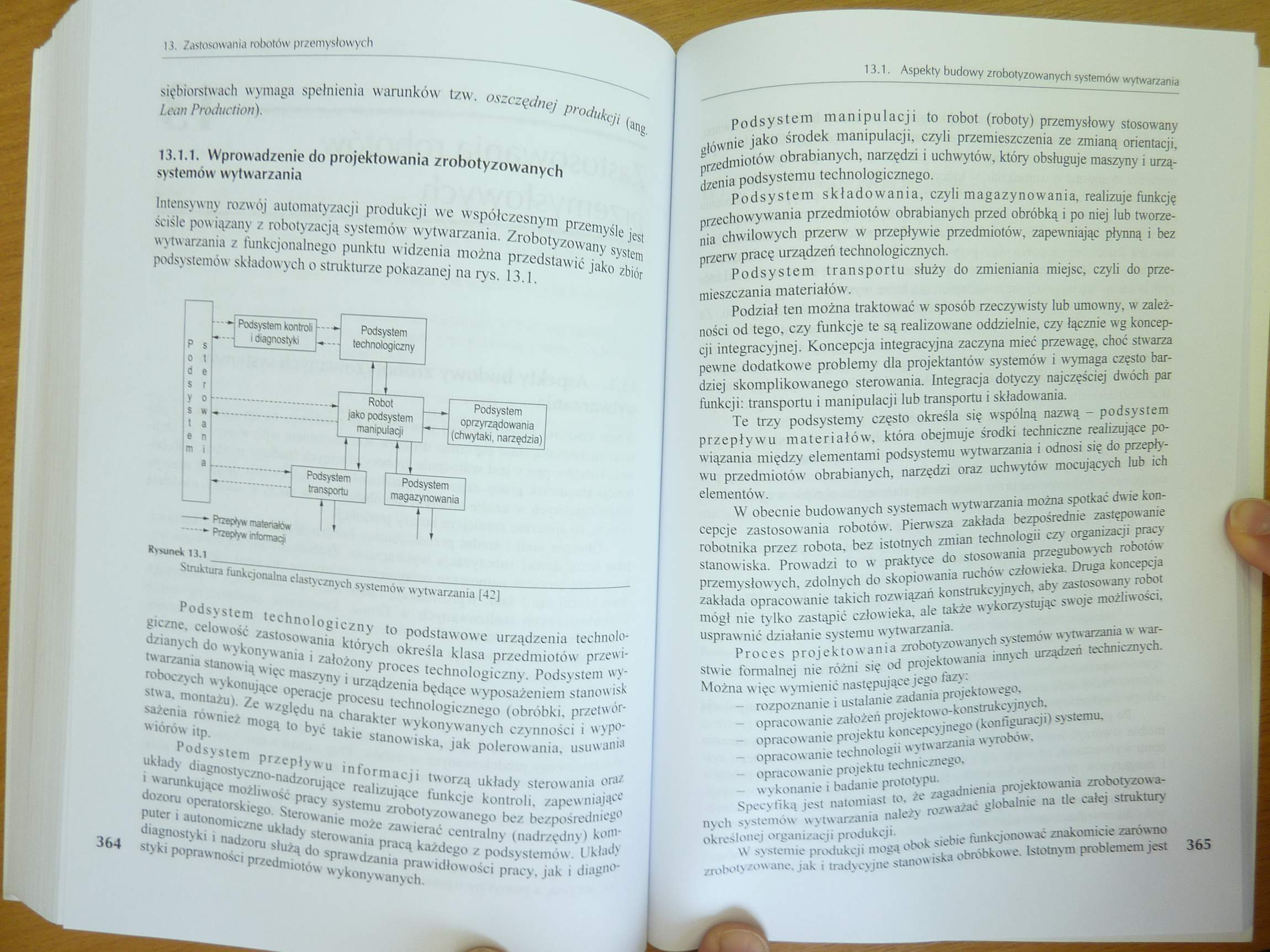
Intensywny rozwój automatyzacji produkcji we współczesnym przemyśle jest ściśle powiązany z robotyzacją systemów wytwarzania. Zrobotyzowany system wytwarzania z funkcjonalnego punktu widzenia można przedstawić jako zbiór podsystemów składowych o strukturze pokazanej na rys. 13.1.
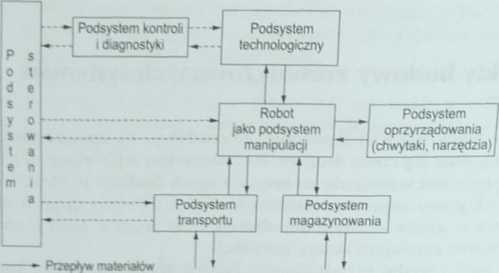
---- Przepływ informacji
Struktura funkcjonalna elastycznych systemów wytwarzania [42]
Rysunek 13.1
Podsystem technologiczny to podstawowe urządzenia technologiczne. celowość zastosowania których określa klasa przedmiotów przewidzianych do wykonywania i założony proces technologiczny. Podsystem wytwarzania stanow ią w ięc maszyny i urządzenia będące wyposażeniem stanowisk roboczych wykonujące operacje procesu technologicznego (obróbki, przetwórstwa. montażu). Ze względu na charakter wykonywanych czynności i wyposażenia również mogą to być takie stanowiska, jak polerowania, usuwania wiórów itp.
Podsystem przepływu informacji tworzą układy sterowania oraz układy diagnostyczno-nadzorujące realizujące funkcje kontroli, zapewniające i warunkujące możliwość pracy systemu zrobotyzowanego bez bezpośredniego dozoru operatorskiego. Sterowanie może zawierać centralny (nadrzędny) komputer i autonomiczne układy sterowania pracą każdego z podsystemów. Układy diagnostyki i nadzoru służą do sprawdzania prawidłowości pracy, jak i diagnostyki poprawności przedmiotów wykonywanych.
Podsystem manipulacji to robot (roboty) przemysłowy stosowany głównie jako środek manipulacji, czyli przemieszczenia ze zmianą orientacji, przedmiotów obrabianych, narzędzi i uchwytów, który obsługuje maszyny i urządzenia podsystemu technologicznego.
Podsystem składowania, czyli magazynowania, realizuje funkcję przechowywania przedmiotów obrabianych przed obróbką i po niej lub tworzenia chwilowych przerw w przepływie przedmiotów, zapewniając płynną i bez przerw pracę urządzeń technologicznych.
Podsystem transportu służy do zmieniania miejsc, czyli do przemieszczania materiałów.
Podział ten można traktować w sposób rzeczywisty lub umowny, w zależności od tego, czy funkcje te są realizowane oddzielnie, czy łącznie wg koncepcji integracyjnej. Koncepcja integracyjna zaczyna mieć przewagę, choć stwarza pewne dodatkowe problemy dla projektantów systemów i wymaga często bardziej skomplikowanego sterowania. Integracja dotyczy najczęściej dwóch par funkcji: transportu i manipulacji lub transportu i składowania.
Te trzy podsystemy często określa się wspólną nazwą - podsystem przepływu materiałów, która obejmuje środki techniczne realizujące powiązania między elementami podsystemu wytwarzania i odnosi się do przepływu przedmiotów obrabianych, narzędzi oraz uchwytów mocujących lub ich elementów.
W obecnie budowanych systemach wytwarzania można spotkać dwie koncepcje zastosowania robotów. Pierwsza zakłada bezpośrednie zastępowanie robotnika przez robota, bez istotnych zmian technologii czy organizacji pracy stanowiska. Prowadzi to w praktyce do stosowania przegubowych robotów przemysłowych, zdolnych do skopiowania ruchów człowieka. Druga koncepcja zakłada opracowanie takich rozwiązań konstrukcyjnych, aby zastosowany robot mógł nie tylko zastąpić człowieka, ale także wykorzystując swoje możliwości, usprawnić działanie systemu wytwarzania.
Proces projektowania zrobotyzowanych systemów wytwarzania w warstwie formalnej nie różni się od projektowania innych urządzeń technicznych. Można więc wymienić następujące jego fazy:
- rozpoznanie i ustalanie zadania projektowego,
- opracowanie założeń projektowo-konstrukcyjnych,
- opracowanie projektu koncepcyjnego (konfiguracji) systemu.
- opracowanie technologii wytwarzania wyrobów,
- opracowanie projektu technicznego,
- w ykonanie i badanie prototypu.
Specyfiką jest natomiast to, że zagadnienia projektowania zrobotyzowanych systemów wytwarzania należy rozważać globalnie na tle całej struktury określonej organizacji produkcji.
W systemie produkcji mogą obok siebie funkcjonować znakomicie zarówno
365
®oboty*owane. jak ' trad-vc-v->ne stanowiska obróbkowe. Istotnym problemem jest
Wyszukiwarka
Podobne podstrony:
P1080375 13. Zastosowania robotów przemysłowym - mają duży udźwig, -
12883 P1080363 13. Zastosowania robotów przemysłowych - łuk utrzymuje się między d
17266 P1080390 13. Zastosowania robotów przemysłowych układy sensoryczne, jest fakt, że prace montaż
więcej podobnych podstron