12279 img179 (9)
179
179
(113)
flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„
< = % ♦ ął “d
i przyjmujemy wartoić średnią,
Zamiu$t sposobu przedstawione,30 na rysunku 19C, nożna również stosować przestrzenna wcięcie w przód z ustalonej dowolnie bazy AB.
4.3. TACKiiETaiA 4,3*1* Zasadyjagólas
Metoda pomiarów tachimcfcryczoych polega ca szybkim określaniu wysokości i sytuacji punktów terenu (tachlmetria - szybki poniar).
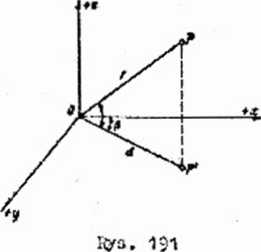
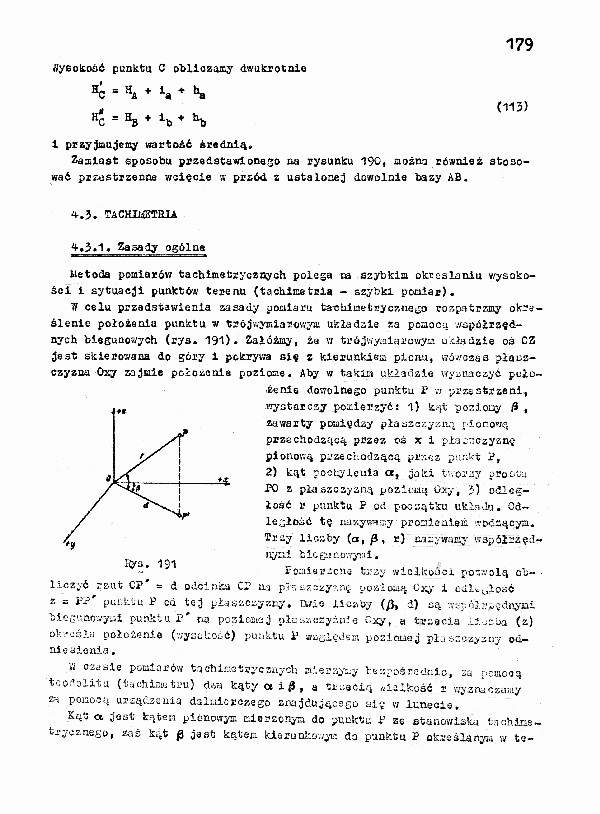
7F celu przedstawienia zasady' pomiaru tn-chinetsycznego rozpatrzmy określenie położenia punktu w t?ójwyr;larowym układzie za pomocą .współrzędnych biegunowych (rys- 191)* Załóżmy, ż« v; trójwy.aiur u wyxa układzie oś CZ jest skierowana do góry i pokrywa się z kierunkiem picnu, wówczas płaszczyzna Ozy zajmie położenie poziome* Aby w takim układzie wyznaczyć położę ni o dowolnego punktu i v; prze afer za ni, wystarczy pomierzyć: 1) k.-',t poziomy fi , zawarty pouiydzy płassc/.yzną riono^ą przechodzącą przez oś x i płosnczyznę pionową przechodzącą przez punkt i\
2) k.ąt pocbyleuia cr, jaki t-.orzy prosty PO z płaszczyzną pozimą Oxy, 3) odłcę-łość v punktu P od początku ukłnJu. Odległość tę promienieli 'rodzącym.
Trzy liczby (a, fi, r) muywnriy współrżęd-nyni b io gy r.owym i.
roaieyzcne trzy wielkości po.wolą cc- • liczyć rzut CP' = d odcinka CP na płaszczyznę poziomą Cxy i cdl^.0losć z = IV' piu.ktu P ca tej płaszczyzny, li/io liczby (/), i) są współ iv$<tayni biegunowymi punktu P* na poziomej nłuśzczyżufc Cxy, a trzecia łi-jzoa (z) określa położenie (wysokość) punktu ł1 względem poziomej płaszczyzny odniesienia .
'*' 02*ale potłiorów tącMmctrycznych mierzymy bezpośrednio, za nemooą teodolitu (tachinw tru) dwu kąty ct i fi , a trzecią wielkość r wyzna czujny pomocą urządzenia dalnicr czego zonjdującego uiy v; lunecier Kąt ct jest kątem pionowym cr.ioraer.ya do punktu P zg stanowiska tachins-trycznege, uciś kąt @ jaat kątem kicrunko-wyic da punktu P określany:.; ;y te-
Wyszukiwarka
Podobne podstrony:
12279 img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “
img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “d i pr
img179 (9) 179 179 (113) flyeokoóć punktu C obliczamy dwukrotnie = HA ♦ ia ♦ h„< = % ♦ ął “d i pr
img179 179 179 (113) flyeokość punktu C obliczamy dwukrotnie ®c c ha + Ła *< = % ♦ i* ♦ H 1 przyj
img179 179 179 (113) flyeokość punktu C obliczamy dwukrotnie ®c c ha + Ła *< = % ♦ i* ♦ H 1 przyj
img179 179 179 (113) flyeokość punktu C obliczamy dwukrotnie ®c c ha + Ła *< = % ♦ i* ♦ H 1 przyj
skan0110 Zadania 113 3e:26. Obliczyć entropię standardową, S°, 1 mola lodu w temperaturze 260 K, wie
img179 179 12.2. Parsing dla gramatyki grafowej klasy ETL(l) conid(G, H, i) - boolowska funkcja spra
img179 179 179 By*. 115. Wirnik wentylator* Prryroat ciśnienia gazu w wentylatorze określa
img179 179 zakodowanym różnicowo poszczególnych sygnałów elementowych, p1 = p? = 0,5. pozwala nam to
img179 179 12.2. Parsing dla gramatyki grafowej klasy ETL(l) conid(G, H, i) - boolowska funkcja spra
img179 179 179 By*. 115. Wirnik wentylator* Prryroat ciśnienia gazu w wentylatorze określa
img179 179 zakodowanym różnicowo poszczególnych sygnałów elementowych, p1 = p? = 0,5. pozwala nam to
s 178 178 7. Ruch płaski stąd Wartość przyspieszenia punktu M obliczymy, składając zaznaczone wektor
s 178 178 7. Ruch płaski stąd Wartość przyspieszenia punktu M obliczymy, składając zaznaczone wektor
179 (2) 179 III. Referendum n> sprawach o szczególnym znaczeniu dla państwa. •• u-r.ia szczegółow
więcej podobnych podstron