21367 P1020165
y - Asiu A/
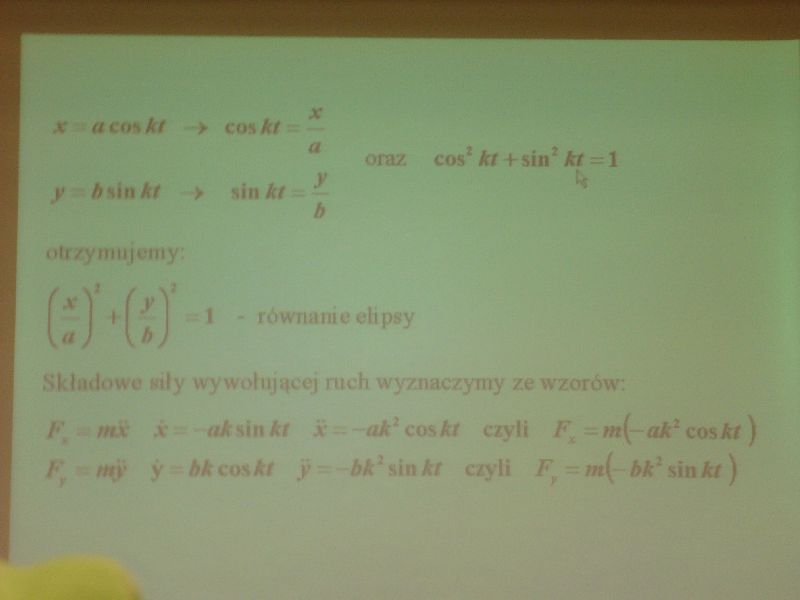
x a co* kt -> cos ki ci
> sin A/ -
b
oraz cos* kt+sin* kt =1
otrzymuj omy:
f—^ + *cl - równanie cli psy
Składowe ńły wywołującej ruch wyznaczymy ze wzorów:
/•' tnx x akm\kt x~ -ak* cos Ar czyli
/<• my y - hkcoslkt y- -bk2ńukt czyli Ff = m(-bk2 sin kt)
Wyszukiwarka
Podobne podstrony:
21367 P1020165 y - Asiu A/ x a co* kt -> cos ki ci > sin A/ - b oraz cos* kt+sin* kt =1otrzymu
P1020165 y - Asiu A/ x a co* kt -> cos ki ci > sin A/ - b oraz cos* kt+sin* kt =1otrzymuj omy:
— Co to takiego? — Wkładają ci rurkę w dupę i pompują coś
— Co to takiego? — Wkładają ci rurkę w dupę i pompują coś
facet5 jpeg Facet jest jak batonik czekoladowy: słodki i pierwsze co robi to dobiera ci się do biode
Image2819 0 = Ci sin O + C 2 cos O + O3 - 2 1 = Ci cos O -C2sir
Slajd10 (183) V i V Facet jest jak batonik czekoladowy:yi / słodki i pierwsze co
Slajd10 (183) V i V Facet jest jak batonik czekoladowy:yi / słodki i pierwsze co
skanuj0017 W Cielaczki Pysio i Bysio Posłuchaj bajki o cielaczkach Pysiu i Bysiu i rób to, co one. J
skanowanie0053 — Zali co mówiłem nie wydało ci się prawdą? Odpowiedziała niewiasta
skan0026 00 07. y ■Ci«rB + ć72S« ‘® + 4*e“!B Qln3®-ln2®+ 2In®-2^ cos 2x»8. y - Ci cosi + Ci sin* - 0
skan0028 70 y s Ci (sin ® + cos®) 4- ^(sin® - cos®) -I- Odp.: 5 z = Ci cos® + C% sin® 4- -e2® 4-
skanuj0017 V Cielaczki Pysio i Bysio Posłuchaj bajki o cielaczkach Pysiu i Bysiu i rób to, co one. J
1259955997 by RiicheP0 Powiedz mi co o niej myślisz A ja ci powiem, jak bardzo się mylisz. w<vw d
IMAG0081 (3) Ą -w W A-J# mmBm *X Ki s <y [K ci oO ;> d ■
IMAG0388 t "*e^v£_ f£*>6(zL ^O** i Ve^. c^cA^^ ki>Ci^ iAA.ę/ ^ LiscĄ
Image (15) I2£>}i HP- Ki t Ci { 8> BiO (^ 7o U 0to . &x )pK ( : Ci{..... ...-......$ ....
więcej podobnych podstron