2tom204
5. MASZYNY ELEKTRYCZNE 410
z cyfrowymi układami sterowania, miernikami cyfrowymi, mikroprocesorami itp. Układy formujące działają dopiero od pewnego progu napięcia i w związku z tym w pobliżu zera prędkości wystąpi strefa nicczułości.
5.6.3.4. Silniki wykonawcze
Są to przetworniki elektromechaniczne przekształcające sygnał elektryczny (napięcie lub fazę napięcia) w przemieszczenie mechaniczne (prędkość obrotową, położenie kątowe) w sposób jednoznaczny — najlepiej proporcjonalny.
Główne wymagania stawiane silnikom wykonawczym są następujące:
— brak „samobiegu” przy braku sygnału sterującego (pożądana samohamowność);
— liniowy przebieg charakterystyk mechanicznych i regulacyjnych;
— duża szybkość działania (mała elektromechaniczna stała czasowa), tzn. także duże początkowe przyspieszenie przy rozruchu;
— stabilność pracy w całym zakresie sterowania prędkości;
— niskie napięcie startu;
— duża trwałość;
— możliwie mała moc sterowania.
Współczesne konstrukcje silników wykonawczych są często bliskie takiemu ideałowi. Podstawowymi rodzajami silników wykonawczych są:
— silniki wykonawcze prądu stałego (SWPS);
— silniki wykonawcze prądu przemiennego (SWPP) — najczęściej dwufazowe indukcyjne.
Silniki wykonawcze prądu stałego
Charakteryzują się one następującymi cechami:
— nie mają zwykle biegunów komutacyjnych i uzwojeń kompensacyjnych;
— ich obwody magnetyczne są najczęściej nienasycone;
— bywają zaopatrzone w stabilizatory prędkości obrotowej i w luzowniki, bądź w tłumiki elektromagnetyczne, a w wykonaniu bezzestykowym w przetworniki położenia wału i komutatory elektroniczne;
— są często przystosowane do wbudowania;
— ich stałe czasowe są znacznie mniejsze od stałych czasowych silników prądu stałego ogólnego zastosowania;
— mogą mieć wzbudzenie elektromagnetyczne lub magnetoelektryczne (to ostatnie znacznie częściej).
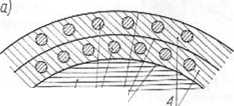
Na rysunku 5.141 przedstawiono przykłady rozwiązań konstrukcyjnych podstawowych odmian SWPS. Silniki o wzbudzeniu elektromagnetycznym mają na ogół budowę klasyczną; są tylko zwykle nieco większe gabarytowo od silników ogólnego zastosowania (obwody magnetyczne nienasycone).
Spośród wielkiej liczby odmian silników wykonawczych prądu stałego o magnesach trwałych można wyodrębnić cztery podstawowe grupy:
— silniki z ferromagnetycznym wirnikiem bezżlobkowym (rys. 5.142a) i uzwojeniem twornika ułożonym na jego powierzchni, przyklejonym lub przymocowanym włóknem szklanym i zalanym żywicą chemoutwardzalną. Charakteryzują się znacznie większą od wirników konwencjonalnych smukłością l/D i wobec braku zębów — indukcją w szczelinie w SW szybkodziałających nawet ok 0,8 -=-1,2 T. Ich elektromechaniczna stała czasowa jest często o rząd wielkości mniejsza. Znikomo mała jest także, wobec wyniesienia uzwojenia twornika do szczeliny, elektromagnetyczna stała czasowa uzwojenia;
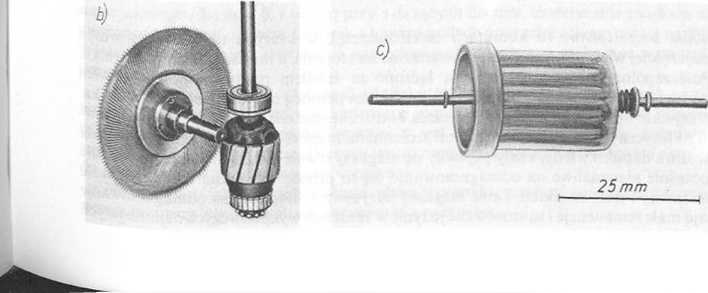
— silniki z wirnikiem tarczowym (rys. 5.142b) i uzwojeniem wykrawanym z blachy miedzianej, przy czym fragment tego uzwojenia stanowi jednocześnie komutator.
Rys. 5.141. Schemat budowy silnika wykonawczego prądu stałego: a) o wzbudzeniu elektromagnetycznym; b) z magnesami trwałymi: c) z tłumikiem; d) z luzownikiem i stabilizatorem prędkości obrotowej 1 — uzwojony wirnik z komutatorem, 2 — uzwojenie wzbudzenia. 3 stojan o biegunach wydatnych, 4 magnes trwały tarczowy magnesowany promieniowo. 5 nabiegunniki, 6 korpus silnika z tłumikiem, 7 wirnik kubkowy tłumika, 8 magnes trwały, 9 — zwora dła strumienia magnesu, 10 stabilizator prędkości, 11 luzownik elektromagnetyczny
jj 2]'
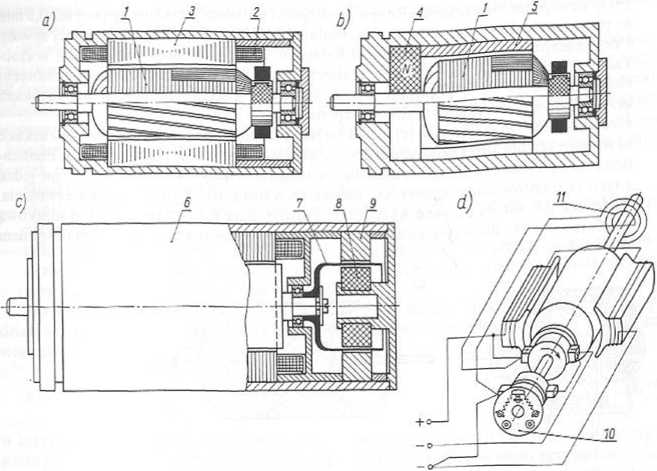
Rys. 5.142. Wirniki szybkorcagujących silników wykonawczych prądu stałego: a) zasada konstrukcji wirnika bczżłobkowego; b) widok wirnika bezżłobkowego i bezżelazowego tarczowego (w porównaniu z wirnikiem konwencjonalnym); c) wirnik kokonowy (kubkowy)
0 przewodach związanych lakierem termoutwardzalnym (system Dunkera)
1 — nieużłobkowany rdzeń wirnika, 2 — przewody, 3 — obręcze z włókna szklanego, 4 żywica chemoutwardzalna
Wyszukiwarka
Podobne podstrony:
2tom208 5. MASZYNY ELEKTRYCZNE 418 Sterowanie amplitudowe (rys. 5.147) polega na zmianie amplitudy n
2tom209 5. MASZYNY ELEKTRYCZNE 420 Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amp
2tom207 5. MASZYNY ELEKTRYCZNE 416 nych materiałów strony wtórnej; wirnik jest umieszczony między uż
2tom200 5. MASZYNY ELEKTRYCZNE 402 Buduje się także jednostki podwójne „dwubiegowe” przeznaczone do
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
2tom202 5. MASZYNY ELEKTRYCZNE 406 Tablica 5.77. Podstawowe dane techniczne niektórych prądnic tacho
2tom203 5. MASZYNY ELEKTRYCZNE 408 5. MASZYNY ELEKTRYCZNE 408 O % »ii v Rys. 5.138. Charakterystyka
2tom205 5. MASZYNY ELEKTRYCZNE 412 Pręty uzwojenia (najczęściej falistego prostego) o grubości zwykl
2tom206 5. MASZYNY ELEKTRYCZNE 414 Rys. 5.144. Rodziny charakterystyk mechanicznych m = /(v) (linia
60 Maszyny Elektryczne - Zeszyty Problemowe Nr 1/2015 (105) Rys. 6. Algorytm sterowania falownikiem
Przetwarzanie danych w układach sterowania. Analiza częstotliwościowa. Wirtualny miernik
Moduł 724[01].Z3 Maszyny elektryczne i układy napędowe 216 724[01].Z3.01 Eksploatowanie
być zakłady produkujące maszyny i urządzenia elektroenergetyczne, zakłady naprawy maszyn elektryczny
5. Maszyny elektryczne i układy napędowe 119 Eksploatowanie
IMG Zawód: technik elektronik Symbol cyfrowy: 311 [07] 311 [07]-01 -082 Numer zada
więcej podobnych podstron