2tom207
5. MASZYNY ELEKTRYCZNE 416
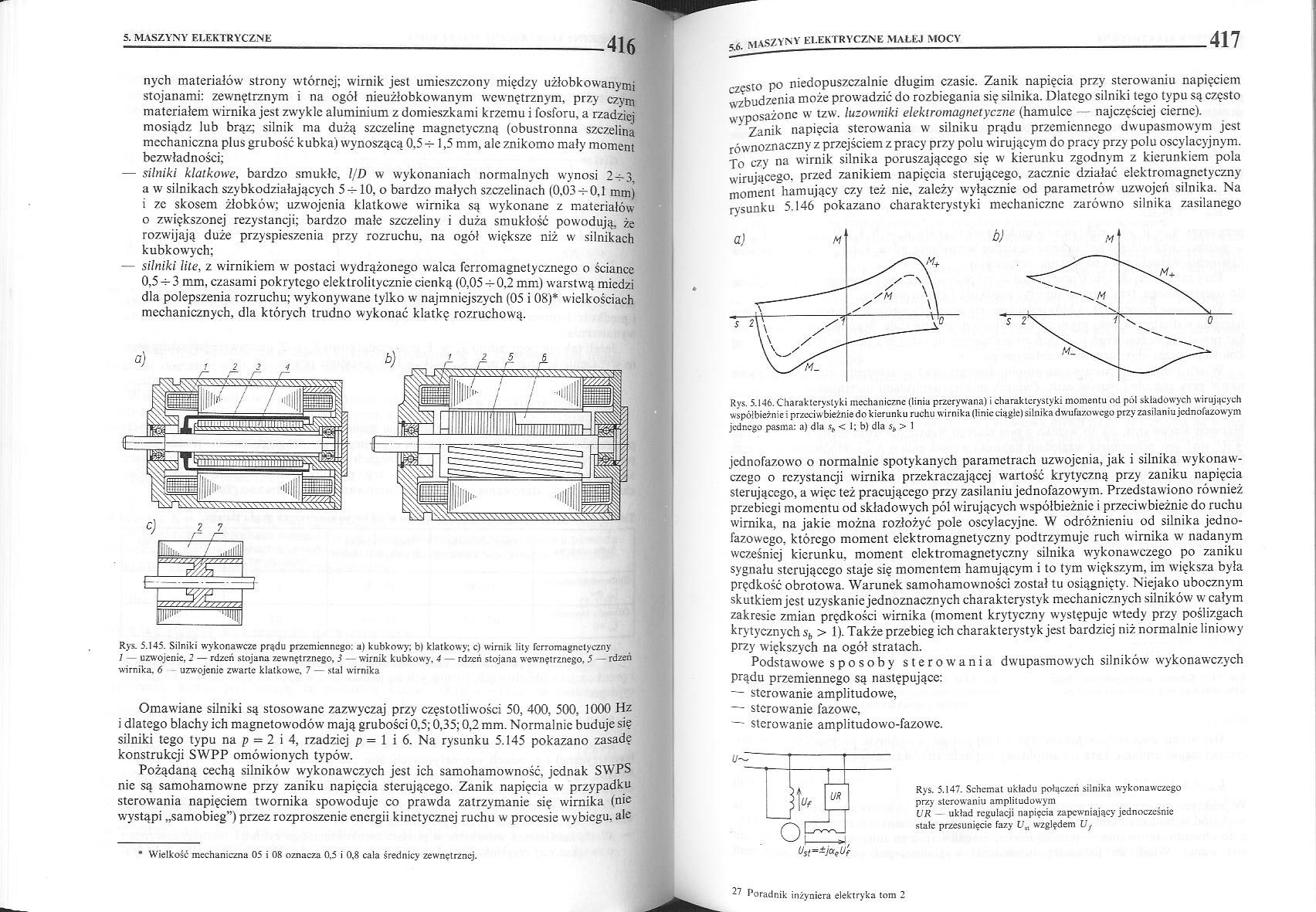
nych materiałów strony wtórnej; wirnik jest umieszczony między użłobkowanymi stojanami: zewnętrznym i na ogói nieużłobkowanym wewnętrznym, przy czym materiałem wirnika jest zwykle aluminium z domieszkami krzemu i fosforu, a rzadziej mosiądz lub brąz; silnik ma dużą szczelinę magnetyczną (obustronna szczelina mechaniczna plus grubość kubka) wynoszącą 0,5 -r-1,5 mm, ale znikomo mały moment bezwładności;
•— silniki klatkowe, bardzo smukłe, l/D w wykonaniach normalnych wynosi 2—3, a w silnikach szybkodziałających 5 ^ 10, o bardzo małych szczelinach (0,03 -t-0,1 mm) i ze skosem żłobków; uzwojenia klatkowe wirnika są wykonane z materiałów o zwiększonej rezystancji; bardzo małe szczeliny i duża smukłość powodują, że rozwijają duże przyspieszenia przy rozruchu, na ogół większe niż w silnikach kubkowych;
— silniki lite, z wirnikiem w postaci wydrążonego walca ferromagnetycznego o ściance 0,5 — 3 mm, czasami pokrytego elektrolitycznie cienką (0,05 -^0,2 mm) warstwą miedzi dla polepszenia rozruchu; wykonywane tylko w najmniejszych (05 i 08)1 wielkościach mechanicznych, dla których trudno wykonać klatkę rozruchową.
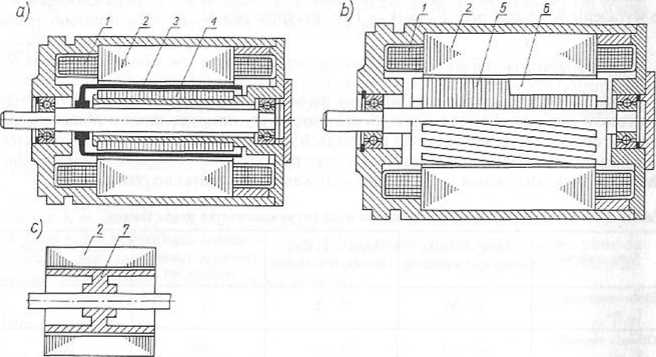
Rys. 5.145. Silniki wykonawcze prądu przemiennego: a) kubkowy; b) klatkowy; c) wirnik lity ferromagnetyczny 1 uzwojenie, 2 — rdzeń stojana zewnętrznego, 3 — wrirnik kubkowy, 4 — rdzeń stojana wewnętrznego, .5 — rdzeń wirnika, 6 uzwojenie zwarte klatkowe, 7 — stal wirnika
Omawiane silniki są stosowane zazwyczaj przy częstotliwości 50, 400, 500, 1000 Hz i dlatego blachy ich magnetowodów mają grubości 0,5; 0,35; 0,2 mm. Normalnie buduje się silniki tego typu na p = 2 i 4, rzadziej p = 1 i 6. Na rysunku 5.145 pokazano zasadę konstrukcji SWPP omówionych typów.
Pożądaną cechą silników wykonawczych jest ich samohamowność, jednak SWPS nie są samohamowne przy zaniku napięcia sterującego. Zanik napięcia w przypadku sterowania napięciem twornika spowoduje co prawda zatrzymanie się wirnika (nie wystąpi „samobieg”) przez rozproszenie energii kinetycznej ruchu w procesie wybiegu, ale często po niedopuszczalnie długim czasie. Zanik napięcia przy sterowaniu napięciem wzbudzenia może prowadzić do rozbiegania się silnika. Dlatego silniki tego typu są często wyposażone w tzw. luzowniki elektromagnetyczne (hamulce — najczęściej cierne).
Zanik napięcia sterowania w silniku prądu przemiennego dwupasmowym jest równoznaczny z przejściem z pracy przy polu wirującym do pracy przy polu oscylacyjnym. To czy na wirnik silnika poruszającego się w kierunku zgodnym z kierunkiem pola wirującego, przed zanikiem napięcia sterującego, zacznie działać elektromagnetyczny moment hamujący czy też nie, zależy wyłącznie od parametrów uzwojeń silnika. Na rysunku 5.146 pokazano charakterystyki mechaniczne zarówno silnika zasilanego
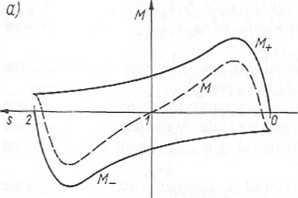
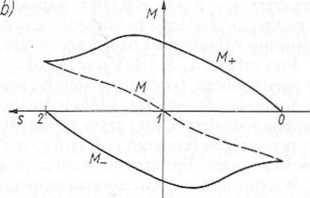
Rys. 5.146. Charakterystyki mechaniczne (linia przerywana) i charakterystyki momentu od pól składowych wirujących współbieżnie i przeciwbieżnie do kierunku ruchu wirnika (linie ciągłe) silnika dwufazowego przy zasilaniu jednofazowym jednego pasma: a) dla sb< 1; b) dla sb > 1
jednofazowo o normalnie spotykanych parametrach uzwojenia, jak i silnika wykonawczego o rezystancji wirnika przekraczającej wartość krytyczną przy zaniku napięcia sterującego, a więc też pracującego przy zasilaniu jednofazowym. Przedstawiono również przebiegi momentu od składowych pól warujących współbieżnie i przeciwbieżnie do ruchu wirnika, na jakie można rozłożyć pole oscylacyjne. W odróżnieniu od silnika jednofazowego, którego moment elektromagnetyczny podtrzymuje ruch wirnika w nadanym wcześniej kierunku, moment elektromagnetyczny silnika wykonawczego po zaniku sygnału sterującego staje się momentem hamującym i to tym większym, im większa była prędkość obrotowa. Warunek samohamowności został tu osiągnięty. Niejako ubocznym skutkiem jest uzyskanie jednoznacznych charakterystyk mechanicznych silników w całym zakresie zmian prędkości wirnika (moment krytyczny występuje wtedy przy poślizgach krytycznych sb > 1). Także przebieg ich charakterystyk jest bardziej niż normalnie liniowy przy większych na ogół stratach.
Podstawowe sposoby sterowania dwupasmowych silników wykonawczych prądu przemiennego są następujące:
— sterowanie amplitudowe,
— sterowanie fazowe,
— sterowanie amplitudowo-fazowc.
</~
U$t~±iaeVf
Wielkość mechaniczna 05 i 08 oznacza 0,5 i 0,8 cala średnicy zewnętrznej.
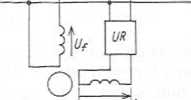
Rys. 5.147. Schemat układu połączeń silnika wykonawczego przy sterowaniu amplitudowym
UR układ regulacji napięcia zapewniający jednocześnie stałe przesunięcie fazy Ua względem Uf
27 Poradnik inżyniera elektryka tom 2
Wyszukiwarka
Podobne podstrony:
2tom204 5. MASZYNY ELEKTRYCZNE 410 z cyfrowymi układami sterowania, miernikami cyfrowymi, mikroproce
2tom200 5. MASZYNY ELEKTRYCZNE 402 Buduje się także jednostki podwójne „dwubiegowe” przeznaczone do
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
2tom202 5. MASZYNY ELEKTRYCZNE 406 Tablica 5.77. Podstawowe dane techniczne niektórych prądnic tacho
2tom203 5. MASZYNY ELEKTRYCZNE 408 5. MASZYNY ELEKTRYCZNE 408 O % »ii v Rys. 5.138. Charakterystyka
2tom205 5. MASZYNY ELEKTRYCZNE 412 Pręty uzwojenia (najczęściej falistego prostego) o grubości zwykl
2tom206 5. MASZYNY ELEKTRYCZNE 414 Rys. 5.144. Rodziny charakterystyk mechanicznych m = /(v) (linia
2tom208 5. MASZYNY ELEKTRYCZNE 418 Sterowanie amplitudowe (rys. 5.147) polega na zmianie amplitudy n
2tom209 5. MASZYNY ELEKTRYCZNE 420 Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amp
Stojan Podstawy We wszystkich maszynach elektrycznych siła działająca na przewód z prądem dana jest
2tom123 5. MASZYNY ELEKTRYCZNE 248 — tarczowe o jednym stojanie i jednym wirniku -
2tom150 5. MASZYNY ELEKTRYCZNE 302 stosowane rozwiązanie odwrotne; wówczas w wirniku uzwojenie tworn
447 3 11.5. UKŁADY ELEKTRYCZNE ELEKTROWNI JĄDROWYCH nikami sód-sód i pompami obiegowymi) jest umiesz
4. MATERIAŁ NAUCZANIA4.1. Zasada działania urządzeń i maszyn elektrycznych4.1.1.
Aspekty rozwoju małych maszyn elektrycznych 67 Dalsze doskonalenie technologii i materiałów przyczyn
4. MATERIAŁ NAUCZANIA4.1. Ogólne wiadomości o maszynach elektrycznych4.1.1.
DSCF1267 TaM8 4S Podriał mjcifdciej stonowanych w maszynach elektrycznych materiałów clckiroi/olacyj
więcej podobnych podstron