2tom205
5. MASZYNY ELEKTRYCZNE 412
Pręty uzwojenia (najczęściej falistego prostego) o grubości zwykle mniejszej niż 0,5 mm są przyklejone do tarczy z tkaniny wykonanej z włókna szklanego, nasyconej żywicą Przy znacznie lepszych warunkach chłodzenia, w porównaniu z uzwojeniem w żłobkach, dopuszcza się też większe gęstości prądu, co pozwala zwiększyć moment elektromagnetyczny i, podobnie jak w silnikach z ferromagnetycznym wirnikiem bezżłobkowym, zwiększyć szybkość ich reakcji;
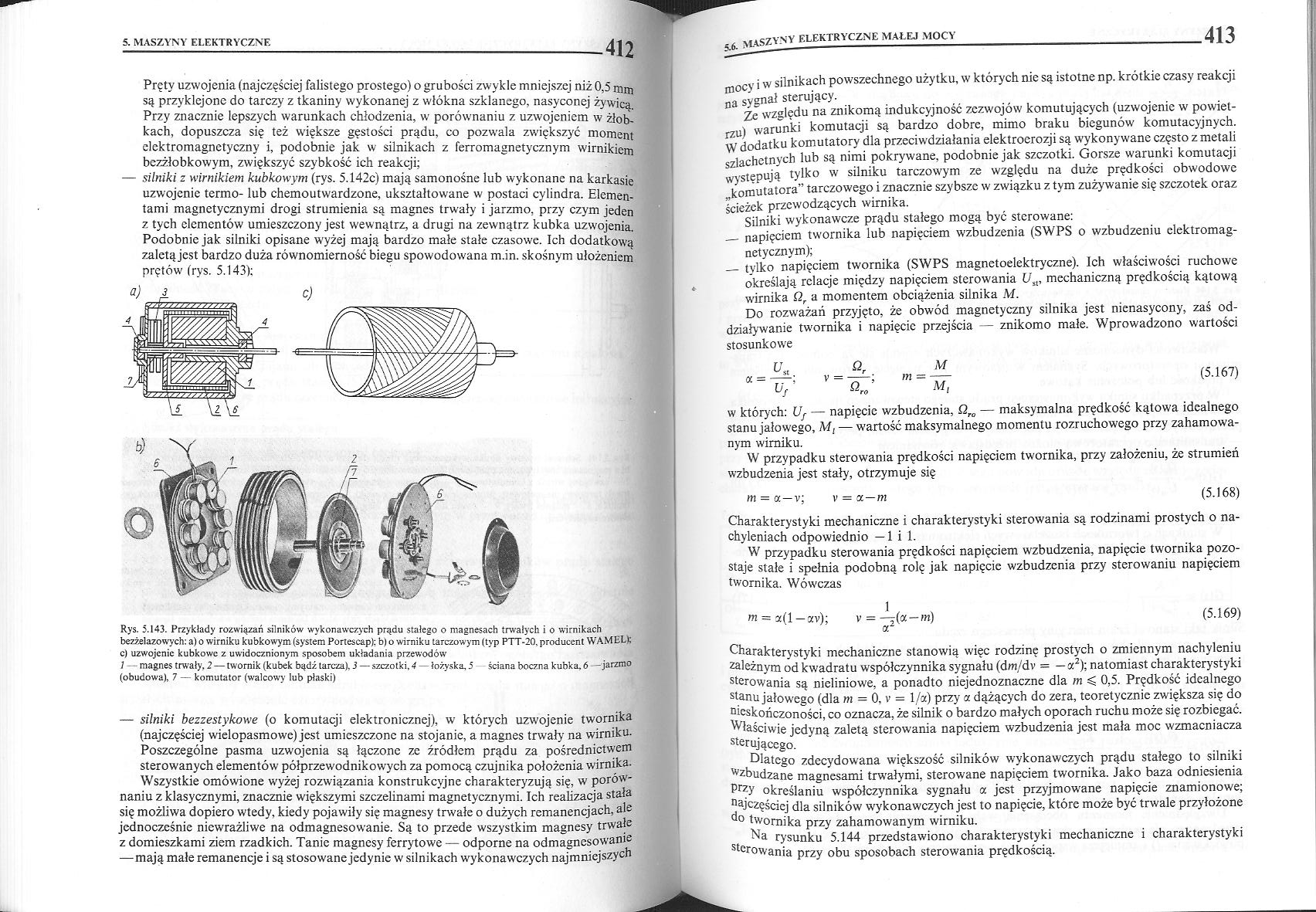
— silniki z wirnikiem kubkowym (rys. 5.142c) mają samonośne lub wykonane na karkasie uzwojenie termo- lub chemoutwardzone, ukształtowane w postaci cylindra. Elementami magnetycznymi drogi strumienia są magnes trwały i jarzmo, przy czym jeden z tych elementów umieszczony jest wewnątrz, a drugi na zewnątrz kubka uzwojenia. Podobnie jak silniki opisane wyżej mają bardzo małe stale czasowe. Ich dodatkową zaletą jest bardzo duża równomierność biegu spowodowana m.in. skośnym ułożeniem prętów (rys. 5.143);
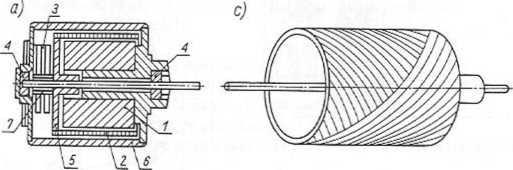
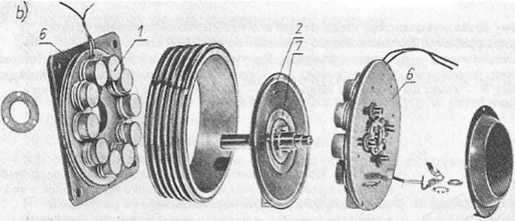
Rys. 5.143. Przykłady rozwiązań silników wykonawczych prądu stałego o magnesach trwałych i o wirnikach bezżel azowych: a) o wirniku kubkowym (system Portescap); b) o wirniku tarczowym (typ PTT-20, producent WAMEL): c) uzwojenie kubkowe z uwidocznionym sposobem układania przewodów
1 magnes trwały, 2 — twomik (kubek bądź tarcza), 3 — szczotki, 4 — łożyska, 5 ściana boczna kubka, 6 -jarzmo (obudowa), 7 — komutator (walcowy lub płaski)
— silniki bezzestykowe (o komutacji elektronicznej), w których uzwojenie twornika (najczęściej wielopasmowe) jest umieszczone na stojanic, a magnes trwały na wirniku. Poszczególne pasma uzwojenia są łączone ze źródłem prądu za pośrednictwem sterowanych elementów półprzewodnikowych za pomocą czujnika położenia wirnika. Wszystkie omówione wyżej rozwiązania konstrukcyjne charakteryzują się, w porównaniu z klasycznymi, znacznie większymi szczelinami magnetycznymi. Ich realizacja stała się możliwa dopiero wtedy, kiedy pojawiły się magnesy trwałe o dużych remanencjach, ale jednocześnie niewrażliwe na odmagnesowanie. Są to przede wszystkim magnesy trwale z domieszkami ziem rzadkich. Tanie magnesy ferrytowe — odporne na odmagnesowanie
— mają małe remanencje i są stosowane jedynie w silnikach wykonawczych najmniejszych mocy i w silnikach powszechnego użytku, w których nic są istotne np. krótkie czasy reakcji na sygnał sterujący.
2e względu na znikomą indukcyjność zczwojów komutujących (uzwojenie w powiet-r?Ul warunki komutacji są bardzo dobre, mimo braku biegunów komutacyjnych. \V dodatku komutatory dla przeciwdziałania elektrocrozji są wykonywane często z metali szlachetnych lub są nimi pokrywane, podobnie jak szczotki. Gorsze warunki komutacji występują tylko w silniku tarczowym ze względu na duże prędkości obwodowe komutatora” tarczowego i znacznie szybsze w związku z tym zużywanie się szczotek oraz ścieżek przewodzących wirnika.
Silniki wykonawcze prądu stałego mogą być sterowane:
_napięciem twornika lub napięciem wzbudzenia (SWPS o wzbudzeniu elektromagnetycznym);
_ tylko napięciem twornika (SWPS magnetoelektryczne). Ich właściwości ruchowe
określają relacje między napięciem sterowania D'st, mechaniczną prędkością kątową wirnika Or a momentem obciążenia silnika M.
Do rozważań przyjęto, że obwód magnetyczny silnika jest nienasycony, zaś oddziaływanie twornika i napięcie przejścia — znikomo małe. Wprowadzono wartości stosunkowe


M
(5.167)
w których: U, — napięcie wzbudzenia, Qr„ — maksymalna prędkość kątowa idealnego stanu jałowego, M, — wartość maksymalnego momentu rozruchowego przy zahamowanym wirniku.
W przypadku sterowania prędkości napięciem twornika, przy założeniu, że strumień wzbudzenia jest stały, otrzymuje się
m = a—v; v = a—m (5.168)
Charakterystyki mechaniczne i charakterystyki sterowania są rodzinami prostych o nachyleniach odpowiednio — 1 i 1.
W przypadku sterowania prędkości napięciem wzbudzenia, napięcie twornika pozostaje stale i spełnia podobną rolę jak napięcie wzbudzenia przy sterowaniu napięciem twornika. Wówczas
w = a(l — zv); v = —y(a—m) (5.169)
or
Charakterystyki mechaniczne stanowią więc rodzinę prostych o zmiennym nachyleniu zależnym od kwadratu współczynnika sygnału (dm/dv = — a2); natomiast charakterystyki sterowania są nieliniowe, a ponadto niejednoznaczne dla m ^ 0,5. Prędkość idealnego stanu jałowego (dla m = 0, v = 1/a) przy a dążących do zera, teoretycznie zwiększa się do nieskończoności, co oznacza, że silnik o bardzo małych oporach ruchu może się rozbiegać. Właściwie jedyną zaletą sterowania napięciem wzbudzenia jest mała moc wzmacniacza sterującego.
Dlatego zdecydowana większość silników wykonawczych prądu stałego to silniki wzbudzane magnesami trwałymi, sterowane napięciem twornika. Jako baza odniesienia Pfzy określaniu współczynnika sygnału a jest przyjmowane napięcie znamionowe; najczęściej dla silników wykonawczych jest to napięcie, które może być trwale przyłożone 0 twornika przy zahamowanym wirniku.
N* rysunku 5.144 przedstawiono charakterystyki mechaniczne i charakterystyki sterowania przy obu sposobach sterowania prędkością.
Wyszukiwarka
Podobne podstrony:
2tom207 5. MASZYNY ELEKTRYCZNE 416 nych materiałów strony wtórnej; wirnik jest umieszczony między uż
II. Pomiary ogólne maszyn elektrycznych 1. Pomiary rezystancji uzwojeń 1.1. Uwagi ogólne We wsz
2tom204 5. MASZYNY ELEKTRYCZNE 410 z cyfrowymi układami sterowania, miernikami cyfrowymi, mikroproce
2tom114 5. MASZYNY ELEKTRYCZNE 230 Izolacja uzwojeń maszyn całkowicie przezwojonych jest poddawana p
2tom119 5. MASZYNY ELEKTRYCZNE 240 Tablica 5.21. Najczęściej stosowane gatunki szczotek w maszynach
2tom200 5. MASZYNY ELEKTRYCZNE 402 Buduje się także jednostki podwójne „dwubiegowe” przeznaczone do
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
2tom202 5. MASZYNY ELEKTRYCZNE 406 Tablica 5.77. Podstawowe dane techniczne niektórych prądnic tacho
2tom203 5. MASZYNY ELEKTRYCZNE 408 5. MASZYNY ELEKTRYCZNE 408 O % »ii v Rys. 5.138. Charakterystyka
2tom206 5. MASZYNY ELEKTRYCZNE 414 Rys. 5.144. Rodziny charakterystyk mechanicznych m = /(v) (linia
2tom208 5. MASZYNY ELEKTRYCZNE 418 Sterowanie amplitudowe (rys. 5.147) polega na zmianie amplitudy n
2tom209 5. MASZYNY ELEKTRYCZNE 420 Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amp
Najczęściej stosowaną metodą pomiaru rezystancji uzwojeń maszyn elektrycznych jest metoda techniczna
Pole stojana Pole wirnika ) Stóito V Uzwojenie stojanaIdea wirującej maszyny elektrycznej Wirnik
414 (9) 414 10. Obliczanie parametrów obwodów elektrycznych maszyn 10.6. Obliczanie parametrów uzwoj
2tom128 5. MASZYNY ELEKTRYCZNE -258 1. Uzwojenia fazowe stojana oznacza się litera
2tom147 5. MASZYNY ELEKTRYCZNE 296 w uzwojeniach fazowych załączonych do sieci (rys. 5.34), moc siln
więcej podobnych podstron