2tom209
5. MASZYNY ELEKTRYCZNE 420
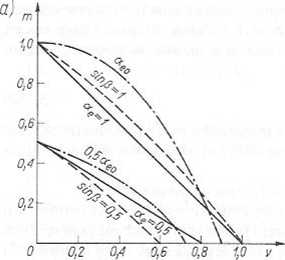
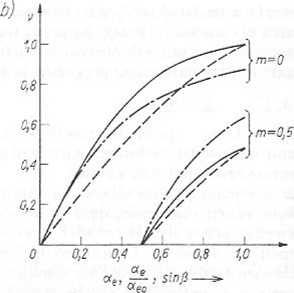
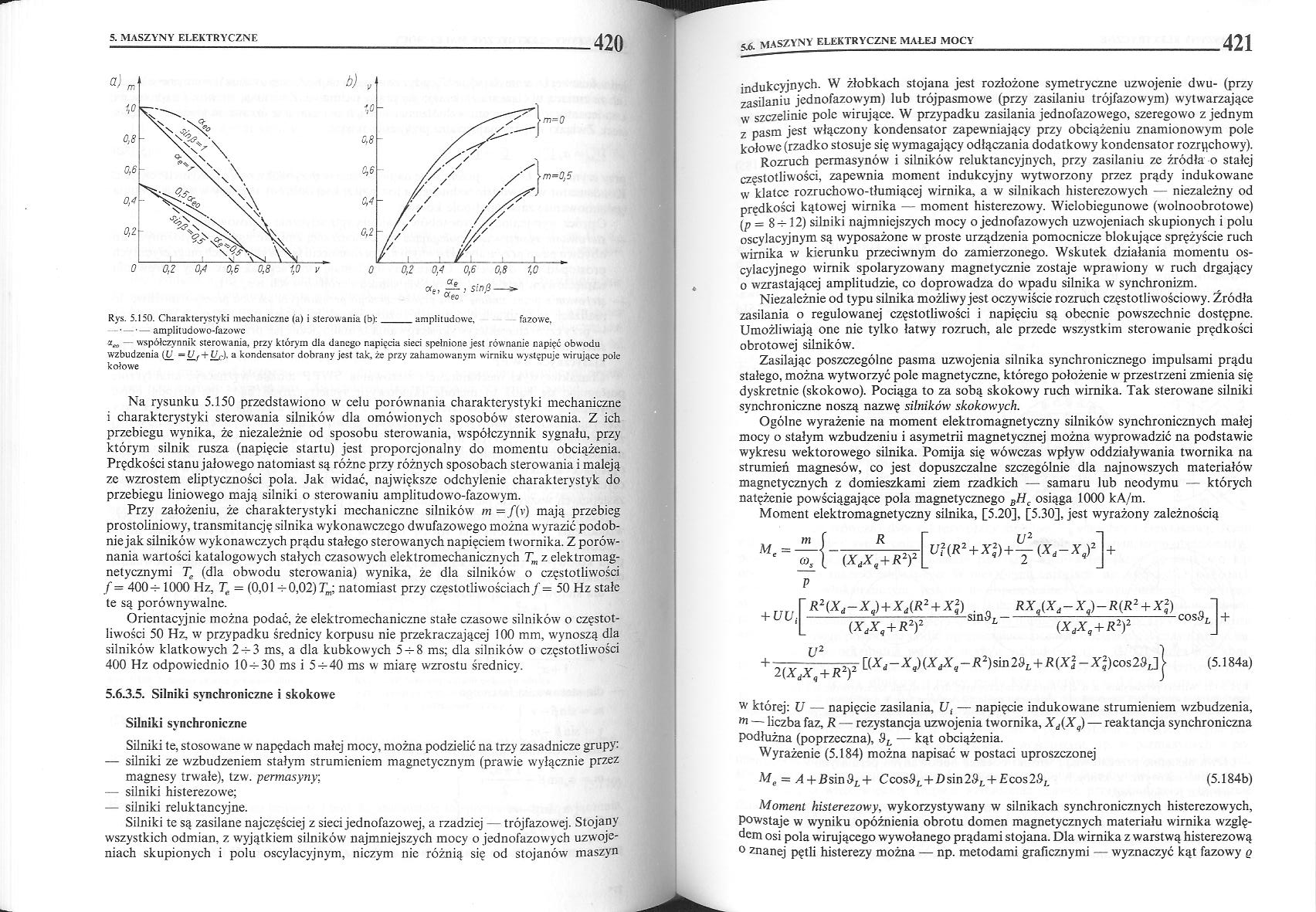
Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amplitudowe, fazowe.
------— amplitudowo-fazowc
cłm współczynnik sterowania, przy którym dla danego napięcia sieci spełnione jest równanie napięć obwodu wzbudzenia {JJ_ — Uj+Ujc), a kondensator dobrany jest tak. że przy zahamowanym wirniku występuje wirujące pole kołowe
Na rysunku 5.150 przedstawiono w celu porównania charakterystyki mechaniczne i charakterystyki sterowania silników dla omówionych sposobów sterowania. Z ich przebiegu wynika, że niezależnie od sposobu sterowania, współczynnik sygnału, przy którym silnik rusza (napięcie startu) jest proporcjonalny do momentu obciążenia. Prędkości stanu jałowego natomiast są różne przy różnych sposobach sterowania i maleją ze wzrostem eliptyczności pola. Jak widać, największe odchylenie charakterystyk do przebiegu liniowego mają silniki o sterowaniu amplitudowo-fazowym.
Przy założeniu, że charakterystyki mechaniczne silników m =/(v) mają przebieg prostoliniowy, transmitancję silnika wykonawczego dwufazowego można wyrazić podobnie jak silników wykonawczych prądu stałego sterowanych napięciem twornika. Z porównania wartości katalogowych stałych czasowych elektromechanicznych Tm z elektromagnetycznymi Te (dla obwodu sterowania) wynika, że dla silników o częstotliwości / = 400-:-1000 Hz, T, = (0,01 -i-0,02) Tm\ natomiast przy częstotliwościach / = 50 Hz stałe te są porównywalne.
Orientacyjnie można podać, że elektromechaniczne stale czasowe silników o częstotliwości 50 Hz, w przypadku średnicy korpusu nie przekraczającej 100 mm, wynoszą dla silników klatkowych 2h-3 ms, a dla kubkowych 5-i-8 ms; dla silników o częstotliwości 400 Hz odpowiednio 10-^30 ms i 5-^40 ms w miarę wzrostu średnicy.
5.6.3.5. Silniki synchroniczne i skokowe
Silniki synchroniczne
Silniki te. stosowane w napędach małej mocy, można podzielić na trzy zasadnicze grupy:
— silniki ze wzbudzeniem stałym strumieniem magnetycznym (prawdę wyłącznie przez magnesy trwałe), tzw. permasyny;
— silniki histerezowe;
— silniki reluktancyjne.
Silniki te są zasilane najczęściej z sieci jednofazowej, a rzadziej — trójfazowej. Stojany wszystkich odmian, z wyjątkiem silników najmniejszych mocy o jednofazowych uzwojeniach skupionych i polu oscylacyjnym, niczym nic różnią się od stojanów maszyn indukcyjnych. W żłobkach stojana jest rozłożone symetryczne uzwojenie dwu- (przy zasilaniu jednofazowym) lub trójpasmowe (przy zasilaniu trójfazowym) wytwarzające w szczelinie pole wirujące. W przypadku zasilania jednofazowego, szeregowo z jednym z pasm jest włączony kondensator zapewniający przy obciążeniu znamionowym pole kołowe (rzadko stosuje się wymagający odłączania dodatkowy kondensator rozruchowy).
Rozruch permasynów i silników reluktancyjnych, przy zasilaniu ze źródła o stałej częstotliwości, zapewnia moment indukcyjny wytworzony przez prądy indukowane w klatce rozruchowo-tłumiącej wirnika, a w silnikach histerezowych — niezależny od prędkości kątowej wirnika — moment histerezowy. Wielobiegunowe (wolnoobrotowe) (p = 8—12) silniki najmniejszych mocy o jednofazowych uzwojeniach skupionych i polu oscylacyjnym są wyposażone w proste urządzenia pomocnicze blokujące sprężyście ruch wirnika w kierunku przeciwnym do zamierzonego. Wskutek działania momentu oscylacyjnego wirnik spolaryzowany magnetycznie zostaje wprawiony w ruch drgający o wzrastającej amplitudzie, co doprowadza do wpadu silnika w synchronizm.
Niezależnie od typu silnika możliwy jest oczywiście rozruch częstotliwościowy. Źródła zasilania o regulowanej częstotliwości i napięciu są obecnie powszechnie dostępne. Umożliwiają one nie tylko łatwy rozruch, ale przede wszystkim sterowanie prędkości obrotowej silników.
Zasilając poszczególne pasma uzwojenia silnika synchronicznego impulsami prądu stałego, można wytworzyć pole magnetyczne, którego położenie w przestrzeni zmienia się dyskretnie (skokowo). Pociąga to za sobą skokowy ruch wirnika. Tak sterowane silniki synchroniczne noszą nazwę silników skokowych.
Ogólne wyrażenie na moment elektromagnetyczny silników synchronicznych małej mocy o stałym wzbudzeniu i asymetrii magnetycznej można wyprowadzić na podstawie wykresu wektorowego silnika. Pomija się wówczas wpływ oddziaływania twornika na strumień magnesów, co jest dopuszczalne szczególnie dla najnowszych materiałów magnetycznych z domieszkami ziem rzadkich — samaru lub neodymu — których natężenie powściągające pola magnetycznego BHC osiąga 1000 kA,/m.
Moment elektromagnetyczny silnika, [5.20], [5.30], jest wyrażony zależnością

p
+ UU,
+ -
R2(Xd-Xq)+Xd(R2 + X2)^
(XdX. + R2
RXq(Xd-Xq)-R(R2 + X2) H .
T , ł.i COSvr I “ł“
L (XdX,+ R2)2 ŁJ
U2
2 (XdX. + R2y
-[(Xd-Xq)(XdXq-R2)śm2l)L+R(X2d-X2t)cos2l>L]
(5.184a)
w której: U — napięcie zasilania, Ut — napięcie indukowane strumieniem wzbudzenia, ni — liczba faz, R — rezystancja uzwojenia twornika, Xd(Xq) — reaktancja synchroniczna podłużna (poprzeczna), SL — kąt obciążenia.
Wyrażenie (5.184) można napisać w postaci uproszczonej
Me = A +jBsin$Ł-t- Ccosł),-t-DsinŻ^+iEcosŻ,1-), (5.184b)
Moment histerezowy, wykorzystywany w silnikach synchronicznych histerezowych, powstaje w wyniku opóźnienia obrotu domen magnetycznych materiału wirnika względem osi pola wirującego wywołanego prądami stojana. Dla wirnika z warstwą histerezową 0 znanej pętli histerezy można — np. metodami graficznymi — wyznaczyć kąt fazowy o
Wyszukiwarka
Podobne podstrony:
2tom206 5. MASZYNY ELEKTRYCZNE 414 Rys. 5.144. Rodziny charakterystyk mechanicznych m = /(v) (linia
2tom152 5. MASZYNY ELEKTRYCZNE 306 Rys. 5.45. Charakterystyki kątowe maszyny z cylindrycznym wirniki
2tom183 5. MASZYNY ELEKTRYCZNE 368 Rys. 5.103. Charakterystyka zewnętrzna U = /(/) prądnicy 1 obcowz
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
2tom203 5. MASZYNY ELEKTRYCZNE 408 5. MASZYNY ELEKTRYCZNE 408 O % »ii v Rys. 5.138. Charakterystyka
Rys. 1. Typowe charakterystyki mechaniczne silników elektrycznych 1 - synchroniczna, 2 - bocznikowa,
2tom208 5. MASZYNY ELEKTRYCZNE 418 Sterowanie amplitudowe (rys. 5.147) polega na zmianie amplitudy n
IMG207 207 Ry*. 17.2. Charakterystyka mechaniczna silnika bocznikowego Rys. 17.3. Charakterystyka me
Ą > <h > -Pi Rys. 12. Charakterystyki mechaniczne silnika bocznikowego prądu stałego przy r
CCF20111125�011 (4) Rys. 16. Charakterystyki mechaniczne silnika szeregowego z samowzbudzeniem.4.2.
CCF20111125�019 (2) Rys. 26. Charakterystyczna mechaniczna silnika bocznikowego (obcowzbudnego)
CCF20111125�020 Rys. 28. Charakterystyki mechaniczne silnika obcowzbudnego. Rezystancję podano
Laboratorium z Podstaw Konstrukcji Maszyn ryzuje prosta budowa, dobre charakterystyki mechaniczne, a
1tom175 7. ELEKTRONIKA 352 7. ELEKTRONIKA 352 Rys. 7.29. Charakterystyka napifciowo-prądowa obwodu g
3tom061 2 WYTWARZANIE ENERGII ELEKTRYCZNEJ 124 Rys. 2.47. Charakterystyka uniwersalna młyna misowo-r
2tom207 5. MASZYNY ELEKTRYCZNE 416 nych materiałów strony wtórnej; wirnik jest umieszczony między uż
więcej podobnych podstron