2tom128
5. MASZYNY ELEKTRYCZNE -258
1. Uzwojenia fazowe stojana oznacza się literami: U; V; W oraz zacisk zerowy literą N.
2. Uzwojenia fazowe wirnika oznacza się literami K; U; M oraz zacisk zerowy literą Q.
3. Początki uzwojeń fazowych oraz połączone z nimi zaciski wyróżnia się cyfrą 1 zapisaną za symbolem literowym; np. Ul, KI.
4. Końce uzwojeń fazowych oraz połączone z nimi zaciski wyróżnia się cyfrą 2 zapisaną za symbolem literowym; np. VI, L2.
5. Jeżeli w stojanie lub wirniku znajduje się k oddzielnych uzwojeń trójfazowych albo jedno uzwojenie trójfazowe, ale złożone z k oddzielnych pasm, których początki i końce są wyprowadzone na zewnątrz, to zaciski oraz końcówki należące do kolejnych uzwojeń fazowych lub kolejnych pasm wyróżnia się cyframi 1; 2;... k zapisanymi przed symbolem literowym; np.: 1U1,1U2 — oznaczają odpowiednio początek oraz koniec pierwszego uzwojenia fazowego U w stojanie; 2L1, 2L2 — oznaczają odpowiednio początek oraz koniec drugiego uzwojenia fazowego L w warniku.
6. Jeżeli w uzwojeniu fazowym stojana łub wirnika znajdują się zaczepy z wyprowadzonymi na zewnątrz końcówkami, to wyróżnia się je kolejnymi cyframi 3; 4; 5; ... zapisanymi za symbolem literowym uzwojenia; np. U3 — pierwszy zaczep w uzwojeniu fazowym U stojana.
Przy prawidłowym oznaczeniu końcówek lub zacisków Ul, KI, W\ uzwojenia stojana,ich połączenie odpowiednio z przewodami Ul, U2, Li sieci zasilającej powinno zapewnić obracanie się wirnika w prawo, tj. w kierunku zgodnym z ruchem wskazówek zegara, obserwowanym od strony czopa końcowego wału (wg PN-88/E-06708).
S.2.4.2. Rodzaje silników i ich podstawowe charakterystyki
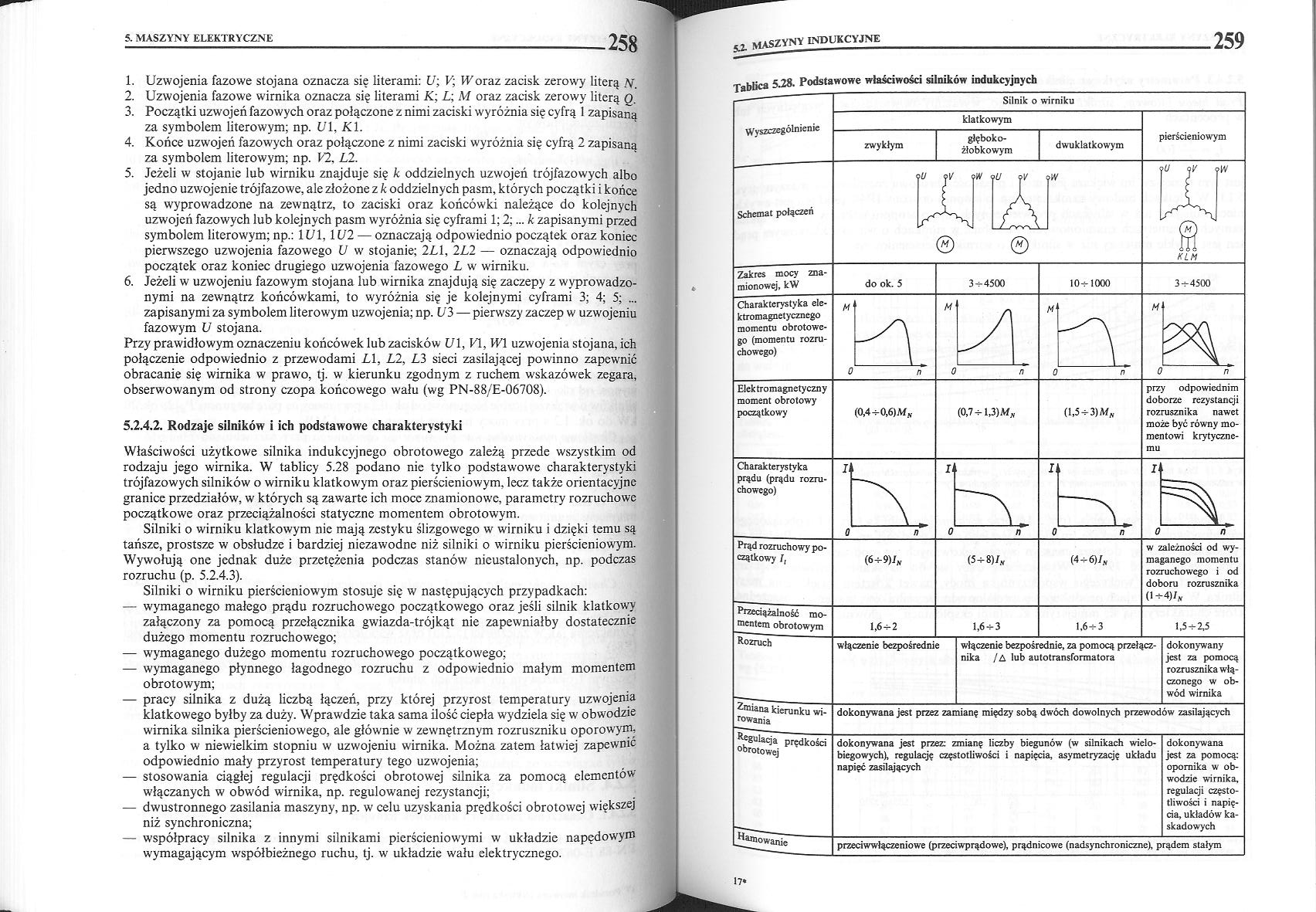
Właściwości użytkowe silnika indukcyjnego obrotowego zależą przede wszystkim od rodzaju jego wirnika. W' tablicy 5.28 podano nie tylko podstawowe charakterystyki trójfazowych silników o wirniku klatkowym oraz pierścieniowym, lecz także orientacyjne granice przedziałów, w których są zawarte ich moce znamionowe, parametry rozruchowe początkowe oraz przeciążalności statyczne momentem obrotowym.
Silniki o wirniku klatkowym nie mają zestyku ślizgowego w wirniku i dzięki temu są tańsze, prostsze w obsłudze i bardziej niezawodne niż silniki o wirniku pierścieniowym. Wywołują one jednak duże przetężenia podczas stanów nieustalonych, np. podczas rozruchu (p. 5.2.4.3).
Silniki o wirniku pierścieniowym stosuje się w następujących przypadkach:
— wymaganego małego prądu rozruchowego początkowego oraz jeśli silnik klatkowy załączony za pomocą przełącznika gwiazda-trójkąt nie zapewniałby dostatecznie dużego momentu rozruchowego;
— wymaganego dużego momentu rozruchowego początkowego;
— wymaganego płynnego łagodnego rozruchu z odpowiednio małym momentem obrotowym;
— pracy silnika z dużą liczbą łączeń, przy której przyrost temperatury uzwojenia klatkowego byłby za duży. Wprawdzie taka sama ilość ciepła wydziela się w obwodzie wirnika silnika pierścieniowego, ale głównie w zewnętrznym rozruszniku oporowym, a tylko w niewielkim stopniu w uzwojeniu wirnika. Można zatem łatwiej zapewnie odpowiednio mały przyrost temperatury tego uzwojenia;
— stosowania ciągłej regulacji prędkości obrotowej silnika za pomocą elementów wsączanych w obwód wirnika, np. regulowanej rezystancji;
— dwustronnego zasilania maszyny, np. w celu uzyskania prędkości obrotowej większej niż synchroniczna;
— współpracy silnika z innymi silnikami pierścieniowymi w układzie napędowym wymagającym współbieżnego ruchu, tj. w układzie w'alu elektrycznego.
Tablica 5.28. Podstawowe właściwości silników indukcyjnych
|
Wyszczególnienie |
Silnik o wirniku | ||||||||
|
klatkowym |
pierścieniowym | ||||||||
|
zwykłym |
głęboko- żłobkowyra |
dwuklatkowym | |||||||
|
Schemat połączeń |
<>U qV oU <?V sW |
X s KLM |
>w | ||||||
|
Zakres mocy znamionowej, k\V |
do ok. 5 |
3-4500 |
10-1000 |
3-4500 | |||||
|
Charakterystyka elektromagnetycznego momentu obrotowego (momentu rozruchowego) |
M |
M |
M |
M |
h |
M | |||
|
0 |
n |
0 |
n |
0 |
n |
0 |
n | ||
|
Elek tromagnetyczny moment obrotowy początkowy |
(0,4-0,6)M„ |
(0,7-l,3)Af,v |
(1,5-3)M„ |
przy odpowiednim doborze rezystancji rozrusznika nawet może być równy momentowi krytycznemu | |||||
|
Charakterystyka prądu (prądu rozruchowego) |
l |
I: |
I |
i |
i | ||||
|
0 |
n |
0 |
n |
0 |
n |
0 |
n | ||
|
Prąd rozruchowy początkowy |
(6-9)i„ |
(5-8 )/„ |
(4—6)/w |
w zależności od wymaganego momentu rozruchowego i od doboru rozrusznika 0-4)7, | |||||
|
Przeciążalność momentem obrotowym |
1,6-2 |
1,6-3 |
1,6-3 |
1,5-2,5 | |||||
|
Rozruch |
włączenie bezpośredni |
włączenie bezpośr nika /& lub au |
ednie, za pomocą przeł? totransformatora |
cz- |
dokonywany jest za pomocą rozrusznika włączonego w obwód wirnika | ||||
|
Umiana kierunku wirowania |
dokonywana jest przez zar |
nianę między sobą dwóch dowolnych przewód |
ów zasilających | ||||||
|
^gulacja prędkości obrotowej 7r ■—■— |
dokonywana jest przez: zmianę liczby biegunów (w silnikach wiclo-biegowych), regulację częstotliwości i napięcia, asymetryzację układu napięć zasilających |
dokonywana jest za pomocą: opornika w obwodzie wirnika, regulacji częstotliwości i napięcia, układów kaskadowych | |||||||
|
Iłowanie |
przeciwwłączeniowe (przeciwprądowe), prądnicowe (nadsynchroniczne), prądem stałym | ||||||||
17*
Wyszukiwarka
Podobne podstrony:
2tom123 5. MASZYNY ELEKTRYCZNE 248 — tarczowe o jednym stojanie i jednym wirniku -
2tom126 5. MASZYNY ELEKTRYCZNE 254 i wirnika. Wykres kołowy sporządza się na podstawie wyników próby
2tom110 5. MASZYNY ELEKTRYCZNE 222 Pierwsza cyfra podaje oznaczenie grupy konstrukcyjnej: 1 &n
2tom120 5. MASZYNY ELEKTRYCZNE 242 Tablica 5.22. Podstawowe wymiary montażowe maszyn elektrycznych m
2tom121 5. MASZYNY ELEKTRYCZNE 244 Tablica 5.24. Wymiary czopów końcowych wałów walcowych, wpustów i
2tom122 5. MASZYNY ELEKTRYCZNE 246Tablica 5.26
2tom127 5. MASZYNY ELEKTRYCZNE 256 Środek okręgu znajduje się w punkcie 0k przecięcia symetrainej od
2tom129 5. MASZYNY ELEKTRYCZNE 260 5.2.4.3. Parametry użytkowe silników ogólnego zastosowania Prąd b
2tom147 5. MASZYNY ELEKTRYCZNE 296 w uzwojeniach fazowych załączonych do sieci (rys. 5.34), moc siln
Elektrody do spawania stali niskowęglowych oznacza się następująco (wg polskiego producenta - Huty B
Nowe skanowanie 20080122065508 00000000E tif 4. Obwód elektryczny rozgałęziony prądu stałego gałęzie
2. Droga to długość odcinka toru. Drogę oznacza się literą s. Drogę w układzie jednostek SI mierzy s
Formuły boolowskie Wyrażenia zbudowane ze stałych {0, 1}, oznaczeń zmiennych (literałów) oraz symbol
CCI20111111�048 ki (odbiornika, obwodu) albo współczynnikiem samoindukcji. Wielkość tę oznacza się l
Pole stojana Pole wirnika ) Stóito V Uzwojenie stojanaIdea wirującej maszyny elektrycznej Wirnik
Transformacja modelu matematycznego maszyny elektrycznej dla obwodów stojana
więcej podobnych podstron